V
主页
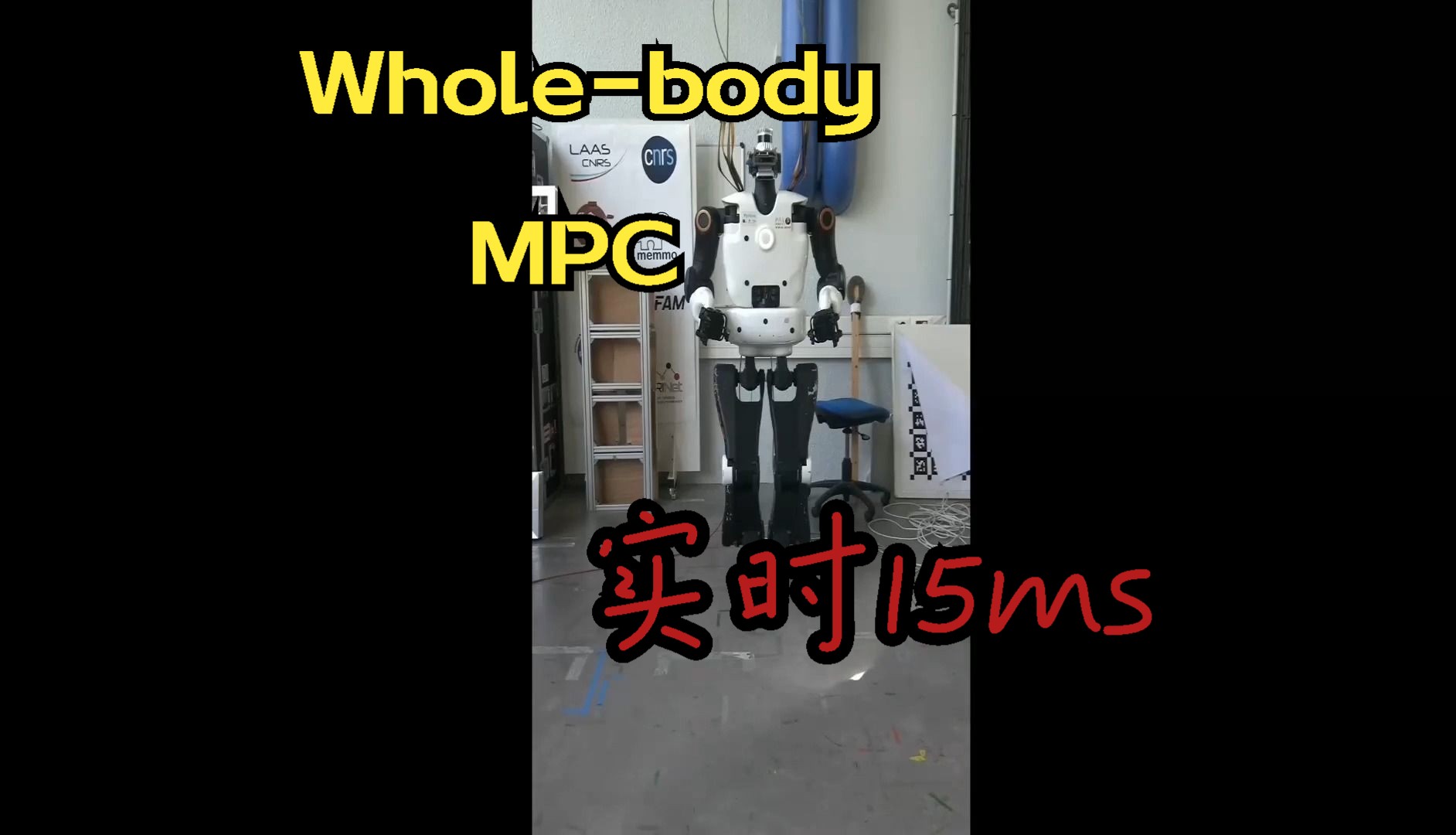
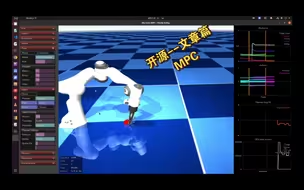
Whole body MPC 在线实时,只需要 15ms
发布人
人形机器人采取crocoddyl在线解算ddp,150个knotes可以实现15ms。 文献《Whole-Body Model Predictive Control for Biped Locomotion on a Torque-Controlled Humanoid Robot》 视频素材来源https://peertube.laas.fr/w/qqPDEuDVbhfbdQ5e8VDCQv ros控制软件包来源 https://www.bilibili.com/video/BV1Ne411d7Lw/?share_source=copy_web&vd_source=a96336b27ce04a388d3def2b1eabf565 我在这个基础上改成了crocoddyl 的ddp求解
打开封面
下载高清视频
观看高清视频
视频下载器
简单入门的whole body MPC人形机器人控制
耗时一个月,终于把人形机器人技术给突破了,为了积攒创业资金,准备开通咨询和技术合作,有需要可以联系我
crocoddyl足式接触机器人优化控制软件例子演示
【开源】基于MPC控制的双腿机器人开源仿真hector,有gazebo,有Matlab版本
基于Crocoddyl搭建的ROS机器人仿真,40公分跳跃,实时whole body MPC控制
[开源]让我真正领悟到控制的美——复杂多自由度,多任务控制案例,ijrr文章解读与仿真(上)
【开源软件】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术的,推荐给大家使用
今年单子越来越多流水越来越大,没办法只能注册公司,不想把时间浪费在杂事上,一年花3800找了个代记账公司帮我报税交社保。在西安租了一套90平的房子做办公室
PID、LQR、MPC实时控制倒立摆仿真对比
公开课--基于优化的机器人控制,机器人建模基础(1)
【开源软件-文章篇】MPC控制,有机械狗、机器人、机械臂、倒立摆的模型,非常方便大家学习控制和机器人技术,推荐给大家用
机器人技术的两大趋势
人形机器人MPC控制案例
梳理人形机器人——底层技术
公开课--基于优化的机器人控制(4),ZMP人形机器人步态规划,LIPM线性倒立摆建模,人形机器人行走
实时最优控制讲座 —— Crocoddyl 教程
怎么让机器人走起来,给宁波大学大三学生的分享
人形机器人,精致、优雅、力量、阶段性成果ing……
运动学、动力学Matlab代码,Roy Featherstone开源的程序,还有russ tedrake教授的研究,可以参考他们的来写
就在友商们还在用电流环测力矩时,我自研了机器人关节输出端的力矩传感器
就在B站的盆友们还在3D打印机器人关节时,友商为我定制了谐波减速器
XR4·迈向未来
【经验】机器人入门系列1--个人经历
稚晖君的机器人又融资了,最新估值70亿
特斯拉“擎天柱” 的“真实”能力!
Sanctuary AI要上岗收银员了~
公开课--基于优化的机器人控制(3),关节空间控制,逆动力学控制,计算力矩法,反馈线性化,人形机器人
Hector人形机器人开源仿真ROS+Gazebo/MPC运动控制
[开源]让我真正领悟到控制的美——复杂多自由度,多任务控制案例,ijrr文章解读与仿真(下)
黑丝喜欢吗
电驱动人形机器人首次实现空翻!
最优控制案例分析,python代码,讲解数值积分、BFGS算法。一步步去拆解关于人形机器人技术、MPC等理论
使用Isaac-sim训练双足机器人行走
人形机器人上层、系统与工程难点
苏黎世联邦理工(ETH Zürich)机器人系统实验室 (RSL)在Science Robotics的最新成果Deep Tracking Control
【腾讯Robotics X实验室】跟真狗学“奔跑跳跃”
特斯拉人形机器人最新进展…
斯坦福炒虾机器人爆火全网!开源的mobile aloha,洗衣做饭移动双臂机器人,直播技术讲解部分录屏
算法工程师说机器人结构
迈出第一步也算成功!!接下来她会快速进化的