V
主页
京东 11.11 红包
苏黎世联邦理工的机器人编程课程(ROS) - ETH Zurich
发布人
https://www.youtube.com/watch?v=Nq8OKFsCrjc Course website: https://rsl.ethz.ch/education-student... Welcome to the first episode of a new series: Courses at ETH Zurich! I was recently a Teaching Assistant for the Programming for Robotics (ROS) course at ETH, so decided to make this course the first in the series, I hope you enjoy! Let me know if you want to see more videos in this series! 👍 0:00 | Intro 1:25 | Course Logistics 3:52 | Teaching Method 6:17 | Grading 7:10 | Q&A with students of the course --------------------- 🎬 OTHER VIDEOS YOU MIGHT LIKE 🎬 ---------------------- Teaching at ETH Zurich: https://youtu.be/9wIAFsfy_JA The Pre-Proposal that got me the ESOP: https://youtu.be/3m5aIYW11dk Masters at ETH Zurich vs TU Delft: https://youtu.be/DyxcvWVYGEA ---------------------------------👋 SAY HI 👋---------------------------------- 📱 Instagram: https://www.instagram.com/itsdavidalonso 🕸️ Website: https://david-alonso.com 🖇 LinkedIn: https://www.linkedin.com/in/david-oor... 🗞 Subscribe to my newsletter: https://david-alonso.com/newsletter 📄 Download my ETH application documents: https://itsdavidalonso.gumroad.com/ (use code: youtube for free download) ---------------------------------🔧 MY TOOLS 🔨---------------------------------- Where I learn creator skills (get 1 month for FREE): https://skl.sh/3lIMfF2 How I build my websites (get 3 months for FREE): https://zyro.com?grsf=vpqnsy 🎶 Music in this video by Peak Twilight: https://open.spotify.com/album/18OPZk...
打开封面
下载高清视频
观看高清视频
视频下载器
阻抗控制的学习与规划
6自由度电液驱动机器人与人机交互
上肢康复机器人Harmony SHR
【TRO】一种可扩展的多机器人远程阻抗控制框架
机器人技术的未来展望 MIT CSAIL
用于提高人类能力柔顺驱动
语言轨迹转换器 LAnguage Trajectory TransformEr - ICRA2023
【IJRR】KUKA IIWA双臂协调运动规划 02
一种磁齿轮及其工作原理
RoK-Arm9 机器人人重力摩擦力补偿实验
基于强化学习的手部触觉灵巧操作
下肢康复外骨骼-LokomatPro 自由模式
Harmony SHR™上肢康复外骨骼的工作方式
DLR 贾斯丁机器人的纪录片
用于脑卒中康复的EXO-UL7机器人
基于学习的机器人足球赛
LIMS3机器人工作空间中的柔顺度测试
KUKA IIWA 人机协同装配1
多模式三级倒立摆实验平台(混沌摆)
机器人遥操作:使用热风枪
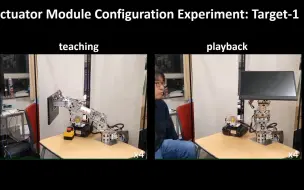
【IROS 2023】基于多目标黑盒优化的日常辅助模块化机器人设计
【IROS2021】具有低惯性独立的 2 自由度踝足假肢,可在不平坦的地形上灵活行走
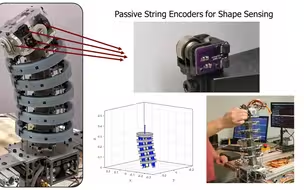
【TRO】 变曲率连续体机器人形状传感的李群公式及灵敏度分析
3自由度球形关节的工作原理(生肉)
手部SEA外骨骼
人形机器人设计方案
具有闭环MPC的稳健行走双足人型机器人
20种有趣的仿生机器人
用于上肢辅助的外骨骼-JEXO
KUKA IIWA-应用肌电图进行人机协作中的变阻抗控制
【整整600集】这绝对是B站讲的最全的半导体工艺教程,从入门到精通,少走99%的弯路!这还学不会,我退出机械圈!
机器人乐队 AUTOMATICA - Robots Vs. Music
整机3D打印的四轴飞行器 Part1
AI变身 男变身女生日宴 人工智能
具有灵巧双臂的人形机器人
大型液压六足机器人
使用达芬奇机器人完成外科手术
ANYexo: A Versatile and Dynamic Upper-Limb Rehabilitation Robot
Apptronik人形机器人快速行为测试
应用于康复中心的上肢康复机器人Armeo