V
主页
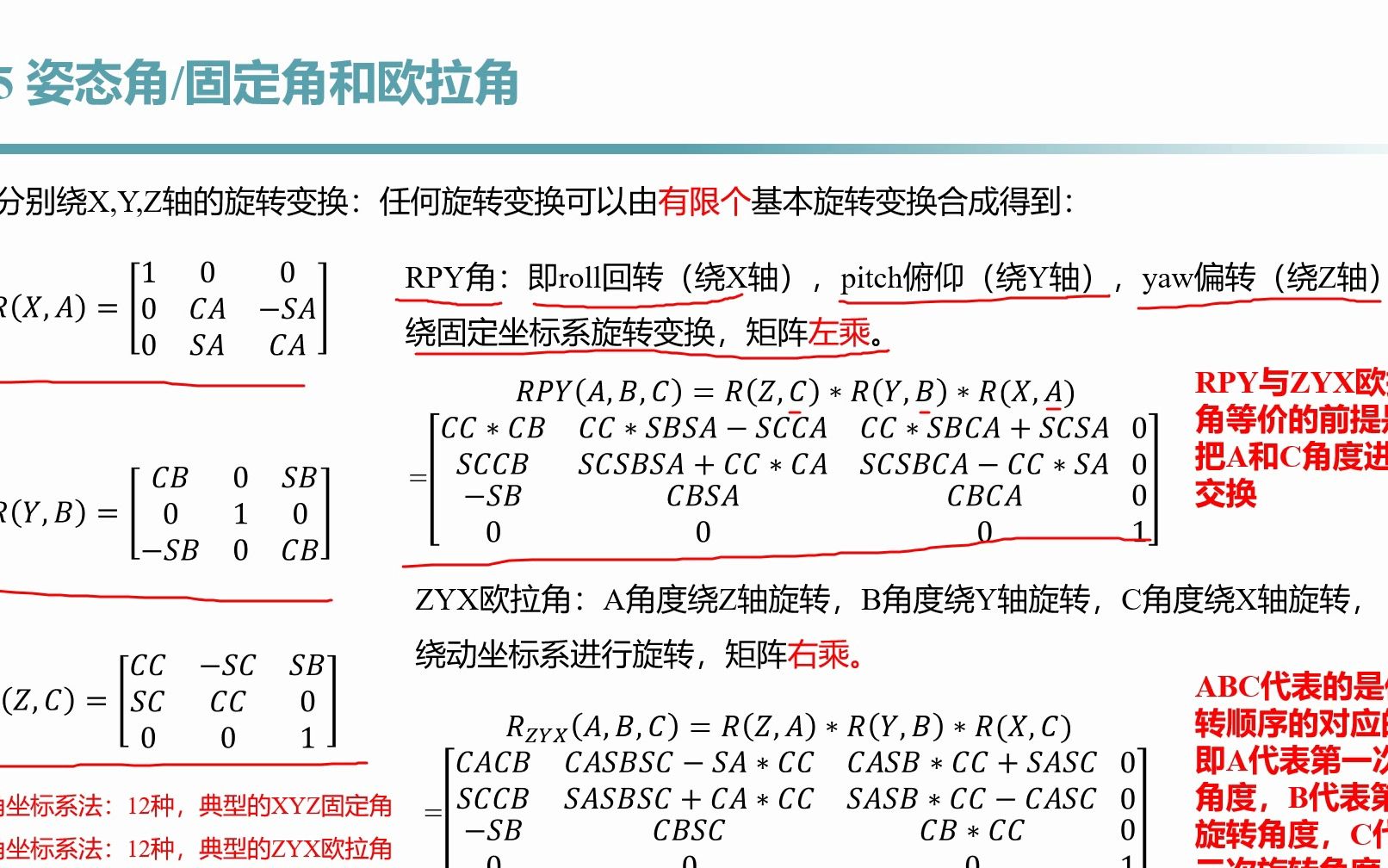
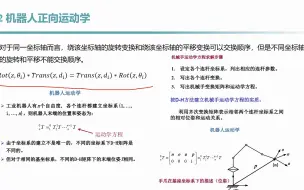
2.6 固定角和欧拉角
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
2.5物体的变换和变换方程
2.4 平移和旋转齐次坐标变换
2.2 机器人学基础-用欧拉角表示旋转矩阵
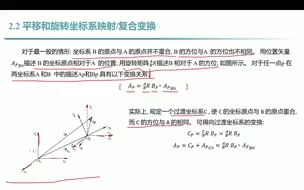
2.3 平移和旋转坐标系映射
11、在机械臂上建立坐标系的大坑!
一大绝招:坐标系中的旋转
2.1 机器人学基础-旋转矩阵
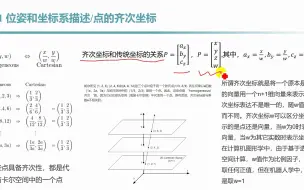
2.1 点的齐次坐标
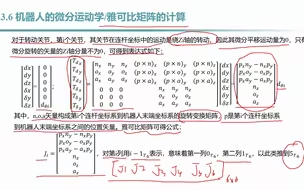
3.10 雅可比矩阵的计算
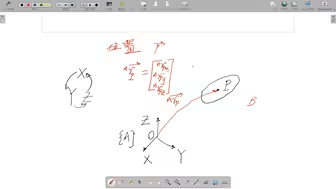
2.2 位置和姿态的表示
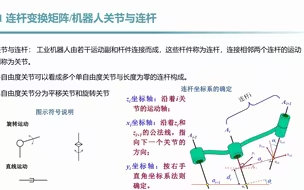
3.1连杆变换矩阵
3.9 坐标系的微分运动与机器人手的微分运动
1.1 机器人的基本概念与发展历程
ArcGIS Pro输出带坐标信息的GeoTIF勘测定界类图纸格式
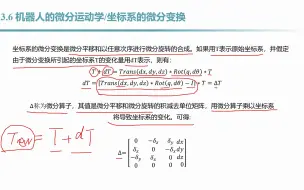
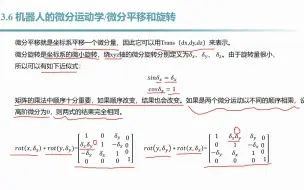
3.8 坐标系微分运动之微分平移和微分旋转
机器人坐标系要与不要之解析
【机器人数学 ROB501 2022】密歇根大学—中英字幕
【机器人学、视觉与图形学的数学方法 CS205A 2013】斯坦福大学—中英字幕
海克斯康三坐标PC-DMIS建立坐标系的常用
blender坐标系轴向无法更改
送分题!一线三垂直模型直接秒了
CAD用户坐标系应用1:坐标标注
12步搭建智能机器人: 从设计到AI入门
1.2 机器人的定义和分类
机器人学动力学三点
3.6 机器人微分运动学之雅可比矩阵(1)
4.1机器人运动规划之关节空间描述和直角坐标系空间描述
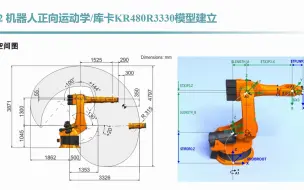
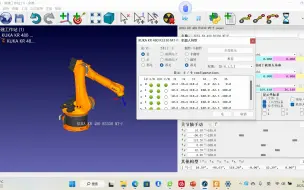
3.3 库卡机器人正运动学模型
PDF图纸如何快速导入地图,现场测量放样?
清华赵明国:智能人形机器人≠智能+人形 | 智者访谈
1.4机器人学的研究领域与应用领域
「精校熟肉」Optimal Control-最优控制 (CMU 16-745) 2024-L13-处理三维旋转问题
新手一定要知道的UG三大坐标系,他们都各自有什么用,如何区分作用
四象坐标系解析
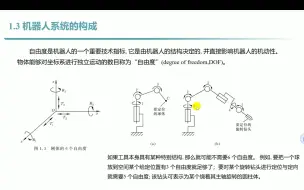
1.3 机器人系统的构成
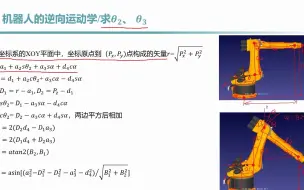
3.4库卡机器人逆向运动学推导
3.5 机器人逆运动学求解之关节位置状态
雷小Py-018:色标colorbar也在坐标系ax中_2024.11.02
⚡️《一 群 蚯 蚓 在 坐 标 系 上 蠕 动》⚡️
3.2 机器人DH参数表达法