V
主页
京东 11.11 红包
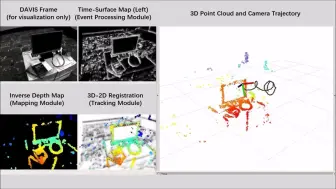
MAVIS:使用基于SE2(3)的精确IMU预积分的多摄像头增强视觉惯性SLAM,该研究成果已被icra2024接受。
发布人
来自澳洲国立大学与腾讯XR视觉实验室组成的研究团队,提出了一种名为MAVIS的专为多相机系统设计的视觉惯性SLAM框架,该研究成果已被icra2024接受。该框架充分利用了多摄像头系统的宽视场优势,以及惯性测量单元提供的尺度测量信息。该系统的实际有效性在公开数据集Euroc上进行了验证,并在ICRA 2023举办的第三届HILTI SLAM Challenge挑战赛上,包揽了视觉组Single-session和Multi-session两项赛道的冠军,比第二名的得分高1.7倍。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶主流感知范式:BEV
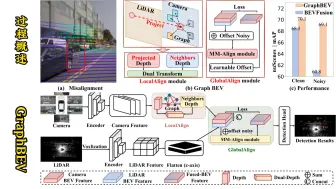
超越BEVFusion!GraphBEV:解决多模态特征不对齐和噪声问题,助力量产
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
CVPR2024 | 利用任务分解改进BEV分割任务!
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
智行者SLAM专家高翔博士:室内无人车和室外无人车有什么区别?
CVPR2024 | ADA-Track: 具有交替检测和关联功能的端 到端多摄像头3D多目标跟踪框架
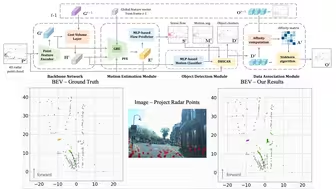
ICRA'2024 | 最新开源!RaTrack4D:使用4D雷达点云进行移动物体检测和跟踪
PETR—作分享:基于位置编码的BEV感知范式
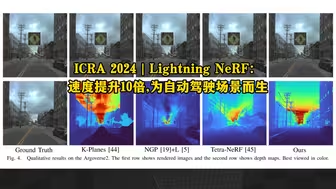
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
视觉SLAMVIO开源代码解析-DSO
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
Waymo研发经理|自动驾驶感知前沿技术介绍
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
【免费公开课】语义信息增强的激光雷达SLAM
融合人与环境的激光雷达三维动态场景感知 | 王程
LIO系统的改进及其在自动驾驶定位模块中的应用 | 高翔
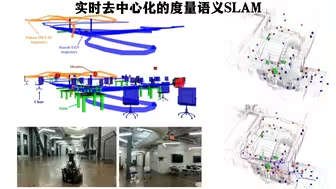
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
无人机对地目标识别与跟踪
NeurlPS'24开源 | GaussianCube 一种用于三维生成建模的结构化和 显式辐射表示,引领三维重建新范式
DOM-60 为机器人带来前所未有的感知能力
AR光波导的应用与发展 | 郑昱
ECCV'24 | 从BEV到OSP:自动驾驶场景建模新趋势,提供更灵活精确的空间预测
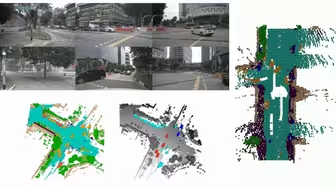
SLAM在自动驾驶中的应用: AVP-SLAM和众包构图 & 非惯性系下VIO探索 | 秦通
三维重建入门到精通,30分钟教你学会运动恢复结构SFM
听劝不要轻易入坑SLAM
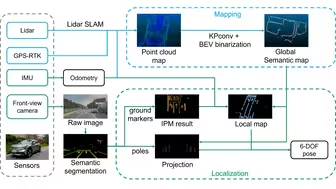
ICRA 2024 | 探索基于语义地图 的自动驾驶汽车单目定位技术
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
港科大沈劭劼组最新开源:双目事件相机视觉里程计!
视觉SLAM开源代码论文带读(DSO)
基于ROS2的树莓派自主定位与导航小车
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
GS-LIVOM (Environment Guideline)
面向自主移动机器人的感知和规划前沿进展 | 刘勇
基于3D高斯渲染技术的高速稠密建图:SplaTAM
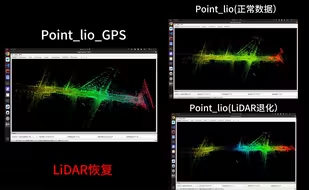
Point_lio_gps解决LiDAR退化导致的里程计漂移。
移动机器人视觉三维感知的现在与将来
浙江大学,百度 | 显著提升BEV三维物体检测性能的体素池方法:BEVSpread
【SLAM】【VIO】双目视觉+超强三维感知力【应用场景——搭载在地铁列车上】“实测”