V
主页
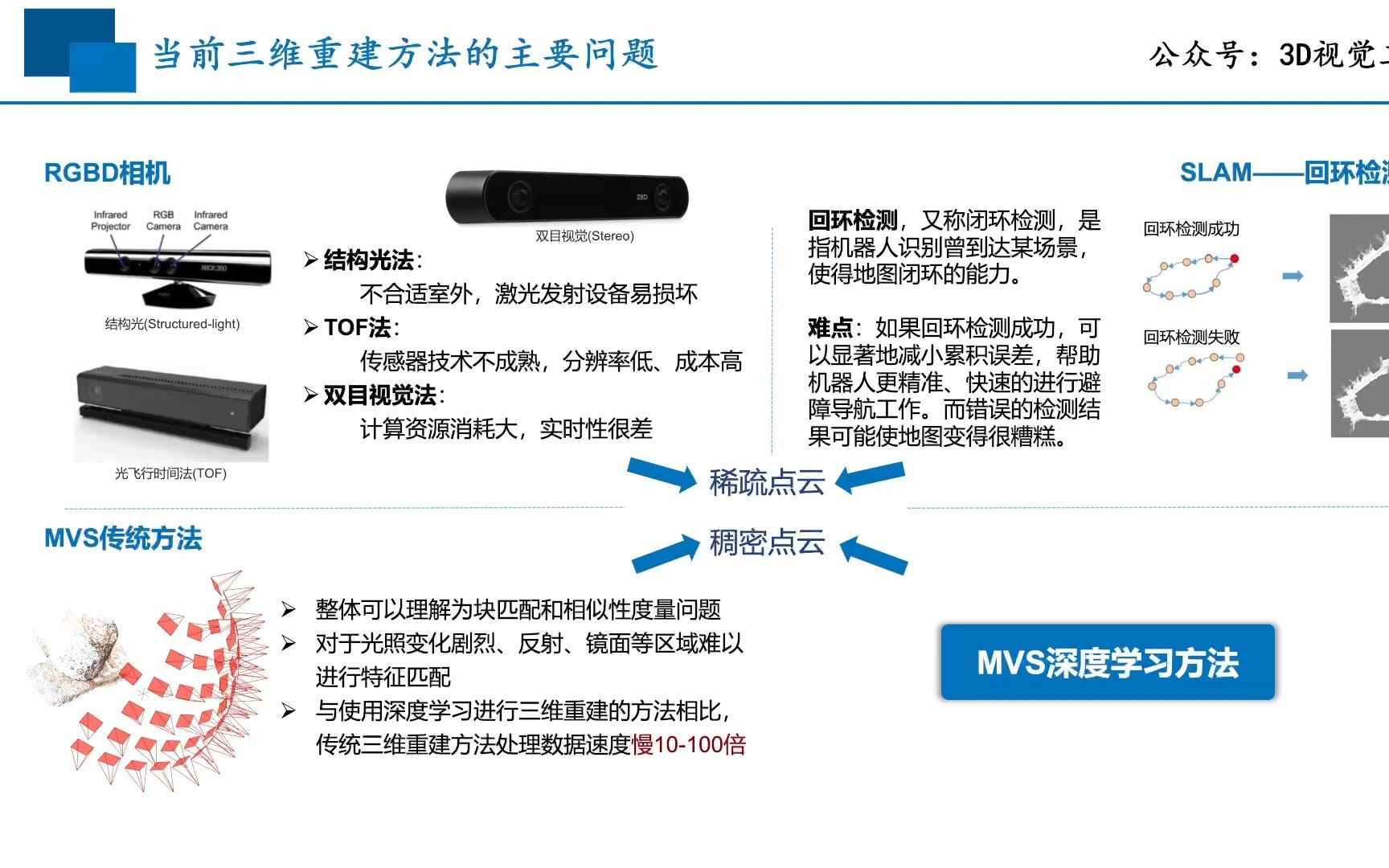
多视图几何MVS简介及MVSNet如何高效入门?
发布人
多视图几何MVS简介及MVSNet如何高效入门? 基于深度学习的三维重建MVSNet系列 [论文+源码+应用+科研],学习入口:https://ebzbf.xet.tech/s/2wFz64
打开封面
下载高清视频
观看高清视频
视频下载器
从零搭建一套结构光3D重建系统 [理论+源码+实践]
研究生必学!目前B站最好的【三维重建】教程,15小时深入浅出SfM与SLAM核心算法!计算机视觉3D三维重建/摄像机几何/多视图几何
3D Gaussian Splatting代码解读第一期(Gaussian_module|Camera)
【已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
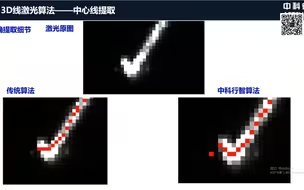
3D线激光相机检测技术解析与应用分享
3D Gaussian Splatting代码解读第二期part1(forward.cu)
三维点云系列视频——第一章绪论
CVPR2023|基于深度学习MVS的最新进展 GeoMVSNet
CVPR'24开源|NeRF-SLAM新SOTA:请任意选择你的高效神经
清华最新开源万能3D分割一切!
多视图几何方式的三维重建
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
三维重建中的网格处理算法分享(公开课)
ICCV 2023 Oral | ScanNet++重磅出世!3D室内场景的高保真数据集!
如何进行三维重建?从单帧深度估计到完整模型重建
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
相机标定的基本原理与经验分享
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
DoGaussian:分布式训练3DGS,速度提升6倍以上,高质量渲染-上篇
这是我看过最强的三维点云+三维重建实战教程! 计算机博士给我教明白了!
Go!最新NeRF和SLAM结合开源方案!超越NICE-SLAM和DROID-SLAM!
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!
无人机|几何约束下多旋翼无人机的全状态在线轨迹规划
Open3D与点云处理简介(公开课)
如何高效学习单目深度估计?
3DGS进化?2DGS颠覆3D场景重建!
3.9k star!2张图片重建稠密3D场景!竟然还不需要相机内参!
视觉快速定位与实时稠密简图简介
BEV与Occupancy入门参考资料必看
深度相机概述
高速结构光三维面形测量方法
什么?不做时间同步也可以实现LiDAR-相机三维重建?
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
双目相机标定基础及标定实战
华科大最新PointDreamer3D纹理重建,清晰如真
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
基于几何信息指导的单目6D物体姿态直接回归算法