V
主页
仿真新世界!Carla-Autoware联合仿真,开启上帝视角!
发布人
视频出自自动驾驶之心平台《Carla-Autoware联合仿真实战》:https://wrzpl.xetslk.com/s/1mVJYs
打开封面
下载高清视频
观看高清视频
视频下载器
端到端趋势下,传统规控还有未来么?
多障碍物联合预测!理论全搞定~
端到端算法是什么?自动驾驶领域是怎么做的?
端到端基础!从原始传感器数据到控制策略
经验之谈,轨迹预测真正重要的是什么?
以特斯拉为案例:自动驾驶仿真框架分析(上,数据搭建/场景建模)
英伟达冠军方案!Hydra-MDP:多模态端到端自动驾驶详解
自动驾驶中的多传感器融合状态估计如何建模?
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
端到端算法有哪些优势?完爆传统感知规控?
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
自动驾驶仿真框架CARLA教程(6):Longer-term model results
牛的!大佬是如何几分钟聊透时空联合规划框架的?
数据为王!自动驾驶开源数据体系现状与未来
毫米波雷达视觉算法CRAFT,这次彻底理解了!
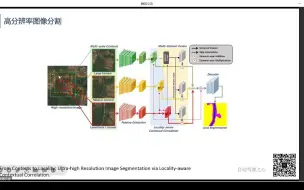
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
为什么自动驾驶离不开模型部署?
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
内卷时代如何降低自动驾驶数据的标注成本?双域主动学习可能是答案!
【深信科创联合制作】仿真数据的一百种玩法 | 基于Carla传感器的仿真数据增强实战来了!
多传感器融合!BEV感知融合算法介绍
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
基于MMyolo框架的YOLOv5+Deepsort的鸡蛋检测系统 | 多区域可选定多目标跟踪应用 代码开源
Nuscenes、KITTI等多个BEV开源数据集介绍!
分类突破!自动驾驶中的Occupancy感知方法分类
ParkingE2E:纯视觉端到端泊车网络(秦通团队出品)
CUDA编程实战教程之:流和事件!彻底搞懂~
【顶级计算机视觉课程】李飞飞计算机视觉公开课!全B站公认的最好的计算机视觉课程!
最新,语义分割三十年!基础与前沿进展!
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
整整200集,比刷剧还爽!深度学习必看圣经!李沐大神《动手学深度学习》最新版全套视频教程分享(人工智能/深度学习/计算机视觉)
斯坦福李飞飞终于把【计算机视觉】给讲明白了!全程16集,草履虫都能听明白!深度学习cs231n公开课【中英字幕】
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
Hydra MDP | 英伟达如何理解端到端自动驾驶?