V
主页
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
发布人
公众号【自动驾驶之心】后台回复“TFLDV2”获取源码!TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
打开封面
下载高清视频
观看高清视频
视频下载器
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2)
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
超详细的激光雷达相机标定教程!(Lidar-Camera)
【能写进简历的项目】3小时带你掌握基于深度学习的车道线检测算法,原理详解+项目实战,看完就能跑通!毕设/课设/深度学习/计算机视觉/OpenCV
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
源码!YOLO v7 + SORT 实现目标检测跟踪(Windows & Linux)
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
使用YOLOv4完成激光雷达点云下的3D目标检测!
端到端算法是什么?自动驾驶领域是怎么做的?
大火的BEVFusion算法详解
太详细了!多传感器融合的策略和方法
【B站最全YOLO系列教程】一口气学完目标检测yolov1-v11,100集算法原理+项目实战,通俗易懂,草履虫听了都点头!(深度学习丨计算机视觉丨YOLO)
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
车厂量产都在用的BEV车道线到底是什么?有什么优势?
从0到1!彻底搞懂BEVFormer算法原理
第89集 | 使用 Ultralytics YOLO11 进行目标检测与跟踪 | 如何进行基准测试 | YOLO11 发布 🚀
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
ICRA2023 | 激光雷达相机内外参联合标定方案!
最新!特斯拉全自动驾驶算法测试一览!
毫米波雷达视觉算法CRAFT,这次彻底理解了!
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
如何在ROS2中使用YOLOv8?
全搞定!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!
【全289集】这才是科研人该学的,目标检测六大算法R-CNN、Fast R-CNN、YOLO、SSD等等一口气学完,全程通俗易懂!-人工智能/目标检测/YOLO
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
【YOLOv11】一小时速通版!知名博士逐一解读配置文件以及代码复现,环境安装+推理+自定义数据集搭建与训练,入门到精通!
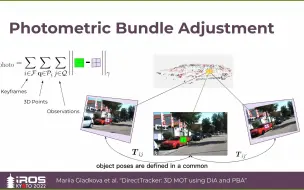
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
Nerf+SLAM会擦出什么样的火花?
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
21 新阳光yolo综合工具箱之Yolo11一键自动训练
自动驾驶多传感器数据融合(4):多目标跟踪算法
车道线检测的未来是MapFree吗?面向可量产方案总结
yolov11&pyside6目标检测可视化界面系统
源码实战!使用RealSense和Jetson Nano完成YOLOv7部署
视觉3D检测如何做自动标注?
最新!DiscoNet:稀疏遮挡Lidar点云下的鲁棒3D感知方法!