V
主页
端到端算法有哪些优势?完爆传统感知规控?
发布人
视频出自国内首个面向工业级的端到端算法与实战教程,视频链接:https://wrzpl.xetslk.com/s/443MxU
打开封面
下载高清视频
观看高清视频
视频下载器
端到端数据格式是什么样的?快来看看吧
端到端自动驾驶:SparseDrive 算法详解
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
端到端趋势下,传统规控还有未来么?
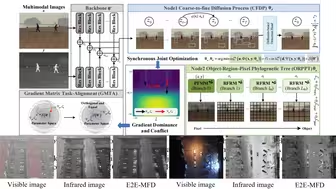
NeurlPS 2024 Oral | E2E-MFD 迈向端到端同步多模态融合检测 为智驾实现同步优化与性能提升
最近有哪些自动驾驶方向的github仓库值得star?
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
PLUTO算法详解:端到端首次超越基于规则的方法
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
NeurIPS'24 | DHD: 多无人机协同感知框架,提升 目标轨迹预测的准确性和全面性
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
透彻!特斯拉occupancy network详解
ICRA 2024 | 轨迹规划的终极状态
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
自动驾驶系统都有什么?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
端到端,技术战还是口水仗?
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
基于深度学习的自动驾驶控制模拟(复现钱彬csdn播客)
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
解决自动驾驶长尾问题,DOME模型结合扩散和OCC技术打造超真实世界模型
轨迹预测到底预测个啥???轨迹预测入门必备!
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
L4自动驾驶感知的终极形态会是协同感知吗?UCLA顶级博士告诉你答案!
多传感器融合!BEV感知融合算法介绍
一文尽览:自动驾驶大语言模型应用综述分享
自动驾驶入门技术全栈实战解析-1-感知篇
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
2025秋招规控/轨迹预测,面试上来就问端到端联合预测。。。
多障碍物联合预测!理论全搞定~
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
如何转行自动驾驶算法?后端开发转行到自动驾驶算法工程师
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
NeurIPS'24预讲会|大语言模型12篇工作:多智能体协作、端到端信息检索、高效微调架构、不确定性感知规划等
自动驾驶中的多传感器融合状态估计如何建模?