V
主页
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
发布人
国内首个多传感器标定系统教程,针对相机内参标定、标定精度优化、传感器到车体标定、Lidar/Radar/IMU/Camera多传感器之间离线标定/在线标定、鱼眼与环视相机标定等20+标定方案展开了详细算法讲解与代码实现,适合感知、标定等算法工程人员从0到1的学习!学习链接:https://gsf.xet.tech/s/dpYnP,小助理微信:AIDriver004
打开封面
下载高清视频
观看高清视频
视频下载器
超详细的激光雷达相机标定教程!(Lidar-Camera)
实战超详细!Radar、Lidar和前置Camera的标定
多传感器标定的工具箱有哪些?
搞懂了!原来激光雷达和相机的内外参是这样标定的
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
【IROS 2022】超大规模环视鱼眼数据集!SynWoodScape:8万张图像,十多个任务标注(检测/分割/深度/光流/事件等)
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
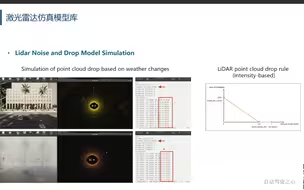
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第2节:高一致性传感器仿真模型库
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
多传感器融合!BEV感知融合算法介绍
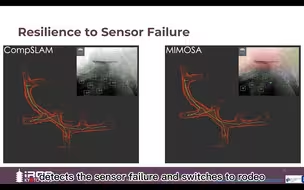
【IROS 2022】多模态SLAM框架MIMOSA:一种针对传感器退化的弹性自治多模态SLAM框架
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
高精地图制作关键技术及领域主流方案分享-part1
Nerf+SLAM会擦出什么样的火花?
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
在线高精地图与城市NOA是什么关系?为什么如此重要?
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
ICRA2021 | 多相机激光雷达的外参标定(基于目标姿态估计)
LIO-SAM:一种紧耦合激光雷达-惯性里程计
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
视觉SLAM进阶-从零开始手写VIO
传感器融合教程 Part 1 - 3D目标检测概述(3D Object Detection Overview)
毫米波雷达量产实战!Radar是如何获取点云的?
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
【IROS 2022】SOTA!基于粒子滤波的机器人定位和建图(浙大)
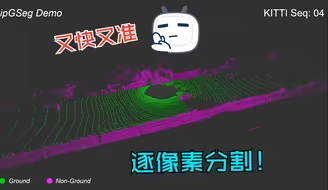
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
透彻!特斯拉occupancy network详解
将SLAM推向全天候环境!CVPR'24:SubT-MRS Dataset
什么是端到端自动驾驶?什么是基础world model?
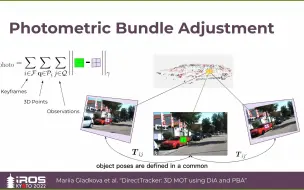
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
ICCV 2023 | Point-SLAM:基于密集神经点云的SLAM!
[IEEE TCSVT 2024]语义无关的动态SLAM
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
自动驾驶入门技术全栈实战解析-1-感知篇