V
主页
京东 11.11 红包
Hydra MDP | 英伟达如何理解端到端自动驾驶?
发布人
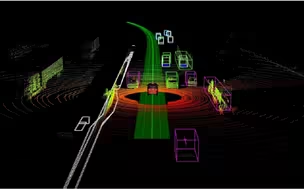
端到端自动驾驶是AV系统开发的一种整体方法,该系统从摄像头、雷达和激光雷达获取原始传感器数据,并直接输出车辆控制。与传统系统依赖于具有独立组件的模块化设计(如检测、跟踪、预测、规划和控制)不同,端到端驱动旨在简化流程,避免从感知到规划的深层次级联路径。NVIDIA的端到端驱动模型Hydra MDP将组件结合到一个具有极简主义设计的单一网络中。规划输入直接来自从传感器数据生成的鸟瞰特征图。NVIDIA研究团队在这一领域的进展赢得了CVPR 2024自动驾驶大挑战赛的端到端大规模驾驶类别。除了比赛中提供的真实世界数据外,该模型还推广到具有高保真传感器的模拟环境中,如NVIDIA Omniverse,以进行进一步的开发和测试。
打开封面
下载高清视频
观看高清视频
视频下载器
端到端数据格式是什么样的?快来看看吧
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
ParkingE2E:纯视觉端到端泊车网络(秦通团队出品)
英伟达冠军方案!Hydra-MDP:多模态端到端自动驾驶详解
冠军!英伟达荣获CVPR端到端自动驾驶挑战赛第一名
端到端算法有哪些优势?完爆传统感知规控?
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
太亮眼!CVPR 2024 自动驾驶方向中稿论文POSTER大全!
特斯拉的World Model是什么?怎么做端到端训练?
端到端趋势下,传统规控还有未来么?
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
绝对前沿!全面剖析自动驾驶具身理解任务!
大火的BEVFusion算法详解
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
CNN&Transformer如何高效部署?大牛带你彻底搞懂!
自动驾驶绕不开的仿真!LightSim:从零开始搭建一个真实、可控、可扩展的自动驾驶仿真平台
EM Planner is all u need?
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
登顶Nature!带事件摄像机的低延迟自动驾驶视觉新方案!
拯救你的CUDA!什么是bank,为什么会发生bank conflict???
内卷时代如何降低自动驾驶数据的标注成本?双域主动学习可能是答案!
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
从未见过如此详细的CPU并行讲解!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!
透彻!特斯拉occupancy network详解
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
端到端自动驾驶离我们还有多远?Think Twice:CVPR 2023闭环新SOTA!
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
经验之谈,轨迹预测真正重要的是什么?
多传感器标定的工具箱有哪些?
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
【2024】卷算法还是走开发?走哪个好进大厂?-人工智能、机器学习、深度学习、程序员、编程
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
自动驾驶如何学好C++?
从轿车到SUV | 英伟达通过动态视图合成的不断突破!
为什么说自动驾驶离不开模型量化?
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
全搞定!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!