V
主页
CMU与MIT联合开源SplaTAM 利用3D高斯进行跟踪建图和稠密重建
发布人
稠密同时定位与地图构建( SLAM )是具身场景理解的关键。最近的工作表明,3D高斯可以使用多个相机对场景进行高质量的重建和实时渲染。在这种情况下,我们首次证明了用3D高斯来表示场景可以使用单目RGB - D相机实现稠密SLAM。我们的方法,SplaTAM,解决了基于先验辐射场表示的局限性,包括快速渲染和优化,确定是否先前映射过的区域的能力,以及通过添加更多的高斯来进行结构化地图扩展。我们使用了一个在线跟踪和建图管道,同时对其进行裁剪,具体使用了底层的高斯表示和通过可微渲染的剪影引导优化。大量实验表明,SplaTAM在相机位姿估计、地图构建和新视角合成方面取得了高达2倍的性能,证明了其相对于现有方法的优越性,同时允许高分辨率稠密三维地图的实时绘制。 文章名称:【Splat, Track & Map 3D Gaussians for Dense RGB-D SLAM】 文章链接:http://arxiv.org/abs/2312.02126 项目地址:https://spla-tam.github.io/ 开源代码:https://github.com/spla-tam/SplaTAM
打开封面
下载高清视频
观看高清视频
视频下载器
哈工大、清华联合开源GPS-Gaussian:可泛化的像素级三维高斯溅射,实时人体新视图合成
清华等联合开源!动态 3D 高斯超高保真头部重建
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
法国团队最新开源!3D高斯溅射可以生成三维网格啦!
模型的专属搜索引擎来了!可在线试玩!CMU最新开源!
【入门必看】视觉惯性SLAM“灭霸”:ORB-SLAM3
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!
上科大与中科院联合开源!捕获情境环境中的多人多物交互
CMU & ICRA22 UAV俯瞰视觉定位竞赛亚军技术方案分享|中国科学技术大学
【直播回放】SLAMesh:实时LiDAR定位与Mesh建图
加大洛杉矶分校与浙大等联合开源”物理高斯:用于生成动力学的物理集成三维高斯”
【直播回放】浙大ÐZ开源大型室内场景重建 NICE-SLAM 介绍(上)
超有用!三维重建让起重机实现无人装卸!佐治亚理工!
最新开源|支持惯性、激光雷达、双目和RGB-D传感器的系统!
加州大学搞定透明物体的三维重建,代码开源!
【SLAM前沿讲座】CMU|因子图与鲁棒感知
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
双目VIO+点线特征+抗动态光照! 南洋理工最新开源!
如何快速入门三维重建?应用场景、岗位要求及薪资、技术框架
【最新开源】单目RGB视频就可重建出会动的4D仙人掌玩具!
ICRA22 CMU机器人所讲座 | 机器人自主导航开发环境
CMU & ICRA22 UAV俯瞰视觉定位竞赛冠军技术方案分享|军事科学院
ICRA22 CMU机器人所讲座 | 面向长期自主性的MetaSLAM
首尔大学开源! 轻量级动作捕捉系统,头戴摄像头+智能手表
【线下讲座】史雪松:室内机器人系统的长期视觉定位与建图
UIUC&Adobe开源|无需监督,使用解耦视频分割跟踪任何物体!ICCV2023
UCLA发布|基于稠密点云的快速定位,实时提供准确的姿态估计!
公开课 | 无人机实时及快速地图重建
用于自动驾驶的模拟器,可实时模拟复杂的驾驶情况!MIT开源!
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
CVPR2022|上科大&腾讯&Meta等新研究,人、物分层渲染,复杂交互场景下可快速重建!
CVPR2022|德国宇航中心最新开源!高效率三维目标跟踪
港大等提出细铁丝网SLAM和三维重建!专治疑难杂症😎
【开源】普林斯顿大学发布|端到端深度神经视觉DROID-SLAM,大大超越传统方法!支持单目、双目和RGB-D!
南大、中科院、复旦联合发布!时空锚定的生成式4D高斯 横屏
武汉大学开源! 集成惯性系统的统一无标定板时空标定
【最新技术】ANYmal C 机器人自主探索地下矿井
哈工大博士分享:基于NeRF的SLAM技术发展与代表性开源算法介绍(上)
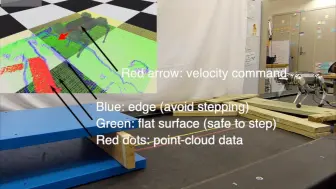
MIT机器狗在非结构化地形的视觉辅助动态探索!
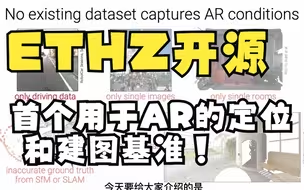
100+小时,45000m²的覆盖面积!首个用于AR的定位和建图基准!ETHZ等新开源,ECCV2022!