V
主页
UCLA发布|基于稠密点云的快速定位,实时提供准确的姿态估计!
发布人
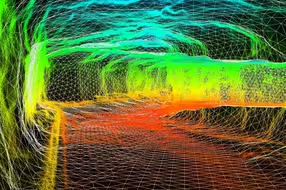
在感知具有挑战性的环境中,野外机器人需要快速准确的状态估计,但现代激光雷达传感器很快就超过了当前的里程测量算法。为此,本文提出了一种轻量级的前端激光雷达里程计解决方案,该解决方案可为计算有限的机器人平台提供一致和准确的定位。我们的直接激光雷达测距(DLO)方法包括几个关键的算法创新,这些创新优先考虑计算效率,并能够使用稠密的、最小预处理的点云来实时提供准确的姿态估计。这是通过一个新的关键帧系统实现的,该系统有效地管理历史地图信息,此外,还提供了一个自定义的迭代最近点解算器,用于数据结构循环的快速点云注册。我们的方法比当前最先进的方法更准确,计算开销更低,并且作为NASA JPL团队CoSTAR针对DARPA地下挑战的研究和开发工作的一部分,我们已经在空中和腿上机器人的多个感知挑战环境中进行了广泛评估。 论文地址:https://arxiv.org/abs/2110.00605
打开封面
下载高清视频
观看高清视频
视频下载器
MIT发布|无需lidar和IMU之间的相对定位,即可提供高速率的里程计估计!
太酷了!手持激光雷达,即可在线实时重建点云!牛津大学最新发布,可用于森林调查!
苏黎世皇家理工等发布!带闭环稠密神经SLAM
我居然半天就学会了三维重建pointnet算法!绝对通俗易懂的3D点云教程!—pointnet++/点云数据可视化/人工智能/深度学习
英特尔最新开源|50%以上的降低,适用于稀疏情况下的深度估计!ICRA2023
香港理工最新开源|实时LiDAR定位与Mesh建图,首个基于CPU的实时激光雷达SLAM系统!
日本先进院发布!GPU加速粒子滤波 6-Dof蒙特卡罗定位
中科院与华南理工联合发布!NeRF与特征匹配相结合进行位姿估计
瑞典皇家理工博士分享开源算法: 点云地图动态障碍物去除基准
350km+的记录,cm级精度的数据集!用于自动驾驶的视觉长期定位!TUM开源!
哈工大、清华联合开源GPS-Gaussian:可泛化的像素级三维高斯溅射,实时人体新视图合成
地下矿井巷道SLAM三维重建激光雷达点云建模——So Easy!
【已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
yyds!CMU最新开源无人机自主导航开发环境,加速无人机算法研发及部署!
SU发布|可匹配10Hz传感器的速率,实现轻量级的实时定位和映射!
CVPR2022|马里兰大学新发布,直接可微相机姿态估计端到端网络!
UCLA发布|效率提高20%,可快速且并行逐点去斜的里程计!
UCB新发布|解决复杂导航问题,用于视觉导航的基础模型!
如何更高效学习GNSS、RTK定位?(含30+论文及两本电子书下载)!
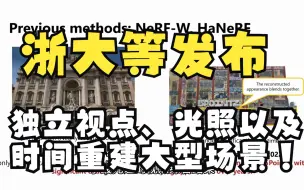
好真实!以独立视点、光照以及时间重建大型场景!浙大&康奈尔大学新发布, CVPR2023
AI三维高斯溅射:弘一法师舍利塔
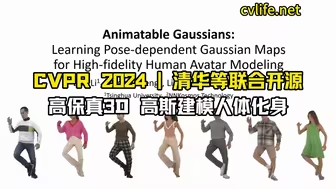
清华等联合开源!高保真3D 高斯建模人体化身
如何使用全景相机去做gaussian splatting 教程1(vismap 篇)
收藏不亏!4个地方,可获得开放的激光雷达数据!
无GPS下,即可在杂乱的森林环境中自主飞行!宾大开源!
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
CVPR2022|德国宇航中心最新开源!高效率三维目标跟踪
提速199倍!LangSplat:清华&哈佛发布三维语义Gaussian Splatting
ECCV 2020 | 基于注意力的端到端自动驾驶视觉定位
ICRA2021最新开源!基于泊松三维重建的激光雷达里程计和建图!
无视干扰,谷歌开源SpotlessSplats:3D场景重建中的干扰物识别与排除
南洋理工新开源|高保真、低成本!实现超分辨率图像重建!
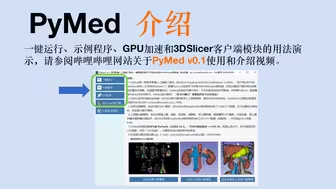
【PyMed v0.2更新】人工智能医学影像分割模型本地部署,一键分割全身104个器官和上尿路器官!
ETHZ最新发布X-ICP 极端环境下鲁棒的激光雷达配准
中科大新发布|轻量级神经路径规划,高效、低成本的机器人导航方法!
MIT发布!实时任务驱动的开集3D场景图
用AI续写Windows开机音乐,又陌生又怀念😭,甚至还有点东方味儿
西安交大&腾讯等|从局部到全局的逐帧配准,可应用于NeRF!CVPR2023
浙大&Google最新发布|RGB图像引导下的基于轻量ToF传感器的深度估计!ECCV2022!
MIT等开源|实时构建3D场景图,机器人探索大规模环境的空间感知算法!