V
主页
USC 2024 机器人基础 第 19 讲 马尔科夫决策过程
发布人
转载 转载 转载
打开封面
下载高清视频
观看高清视频
视频下载器
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
2024 斯坦福 凸优化教程 Stephen Boyd 第 8 讲
USC 2024 机器人基础 第 18 讲 基于采样的运动规划 II
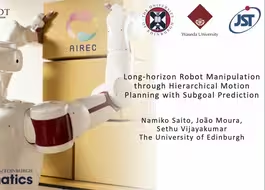
[ ICRA 24 ]通过具有子目标预测的分层运动规划实现长远操控
CMU 最优控制 2024 第一讲
UIUC 机器人讲座 —— 机器人学习:通过理解第一视角视频(Robot Learning by Understanding Egocentric Video)
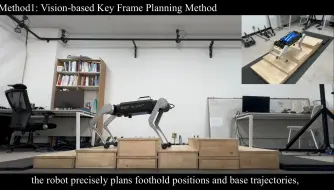
USC 机器人讲座 —— 复杂地形上的机器人运动与感知
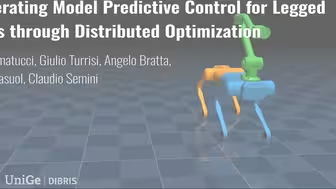
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
实时最优控制讲座 —— 最优控制机器人软件
USC 四足机器人研究 —— 通过 RL 增强 MPC 学习敏捷运动和敏捷行为
西北大学机器人讲座 —— 机器人学习的控制原理
密西根大学机器人讲座 —— 多接触碰撞中的平稳性
ICRA 2024 全部论文及下载方式
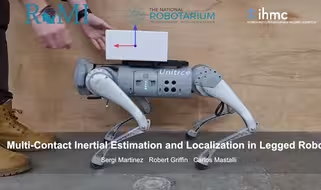
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
北京2024世界机器人大会 美女机器人
宾大 GRASP 讲座 —— 机器人中的具身人工智能
UCSD 机器人讲座 —— 人形机器人的关键技术 + 基于模型 VS 学习的控制
宾大机器人讲座 —— 多接触操作中的学习与控制
MATLAB - Robust Control(鲁棒控制) 官方出品
密歇根大学机器人讲座 —— 机器人学中的高效通用算法
斯坦福机器人讲座 —— 机器人技能获取: 策略表示和数据生成
MATLAB - 使用 RRT 算法路径规划(官方出品)
CMU 最优控制 2024 第 19 讲 卡尔曼滤波器和二重性
ETHZ 四足机器人研究 —— 学习具有风险意识的运动(ICRA 2024)
四足运动:用三种不同的方法在崎岖地形上行走
CMU 最优控制 2024 第 11 讲 Differential Dynamic Programming(DDP)
ETHZ 研究:RL + 基于模型的控制: 利用按需最优控制学习灵活四足运动
意大利 IIT 讲座 —— 结合学习和模型预测控制的机器人安全控制
RoMI Lab 研究 —— 通过全身 MPC 和最优区域选择实现感知运动
CMU 最优控制 2024 第 12 讲 直接轨迹优化
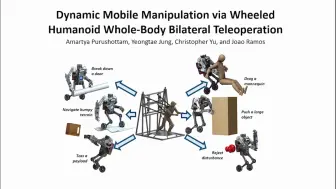
通过轮式仿人机器人的全身遥操作实现动态移动操纵
FAIR(Meta)机器人讲座 —— 机器人灵巧操作(Robotic Dexterous Manipulation)
ETHZ 研究 —— 四足机器人深度柔顺运动控制
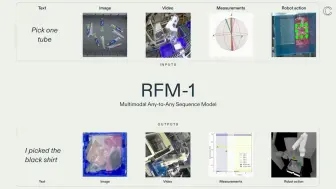
机器人模型 RFM-1 —— 让机器人和人类用自然语言交流
EPFL 机器人研究 —— 视觉CPG-RL: 学习视觉引导的四足机器人运动CPG(ICRA 2024)
普林斯顿机器人讲座 Russ Tedrake - 采用扩散策略的灵巧操作
利用封闭式平行运动链实现仿人机器人的全身控制