V
主页
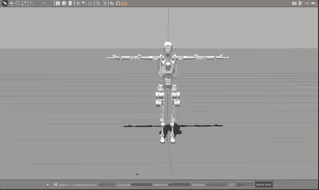
基于ROS通信的分布式多进程路径跟踪控制仿真系统
发布人
基于ros环境实现
打开封面
下载高清视频
观看高清视频
视频下载器
2025工创赛重拳出击
第四届中国高校智能机器人大赛ROS赛项——ROS机械臂抓取项目汇报(全国三等奖)
路径跟踪 | 最优控制LQR算法实现(ROS C++/Python/Matlab)
ROS 颜色目标识别与定位的 C++ 实现
《基于ROS2的决策规划算法工程开发》实机演示
ROS仿真 移动机器人导航 路径规划 运动控制
ROS 颜色目标跟随的 C++ 实现
水动力创未来——多功能水动力无人垃圾清理船
(开源)哪吒 MiniROS 机器人结构安装视频(ROS2)
基于Adams的机械臂抓取仿真实验
ROS 人脸检测的 C++ 实现
机械臂协调控制复现
OpenLoong开源人形机器人青龙Gazebo仿真
ROS SLAM小车
ROS-Gazebo-Rviz-轨迹规划与跟踪算法合集__01_LQR&A_Star
绿化卫士——个性化自动绿篱修剪机
LLM与ROS(机器人操作系统)
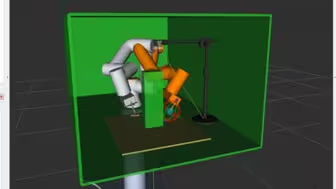
ROS MoveIt规划场景中添加虚拟墙
SLAM算法(浙软夏令营)废柴大学生的所作所为
开箱7自由度协作机械臂,AI视觉识别交互,玩转各种AI创意!
手眼臂合一!亚博智能&大象机器人联手打造,7自由度AI视觉协作机械臂!
RTK履带无人车户外曲线路径跟踪(精度3cm内)
六轴搬运机器人运动仿真分析(含Adams MATLAB 文档 PPT)
机器人公司终于来了位00后运营,领导非常放心,大家觉得怎么样?
FR3仿真机+真机MoveIt路径规划 阿凯法奥ROS包(akai-fr-ros)
可攀爬四足机器人
最后还是用amcl定位才连续成功导航了三次
基于Adams与Matlab的联合仿真
【咋个说】大家对这个mid360呼声很高嘛|做出来演示一下
ROS小车基于视觉的平台姿态校准与路径规划实践
专家:这无人机得逼着策划人加班想新赛题了
【ROS】【三维重建】【工程实践】 雷达+深度相机实现深度优先搜索
Github排行第一的编程自学项目!普通人逆袭的绝好机会
2021电赛F题双车通信(全国一等奖)
《松灵ROS 2开讲啦》第三期 ROS 2的URDF编写和Gazebo仿真控制
移动机械臂抓取
【全195集】禁止自学走弯路!回归算法、聚类算法、决策树、随机森林、神经网络、贝叶斯算法、支持向量机等十大机器学习算法一口气学完!
刘慈欣1989年写的计算机程序
滑环式可重构机电一体化蛇形机器人
Prometbeus开源平台ROS无人机追踪小车项目开发实战