V
主页
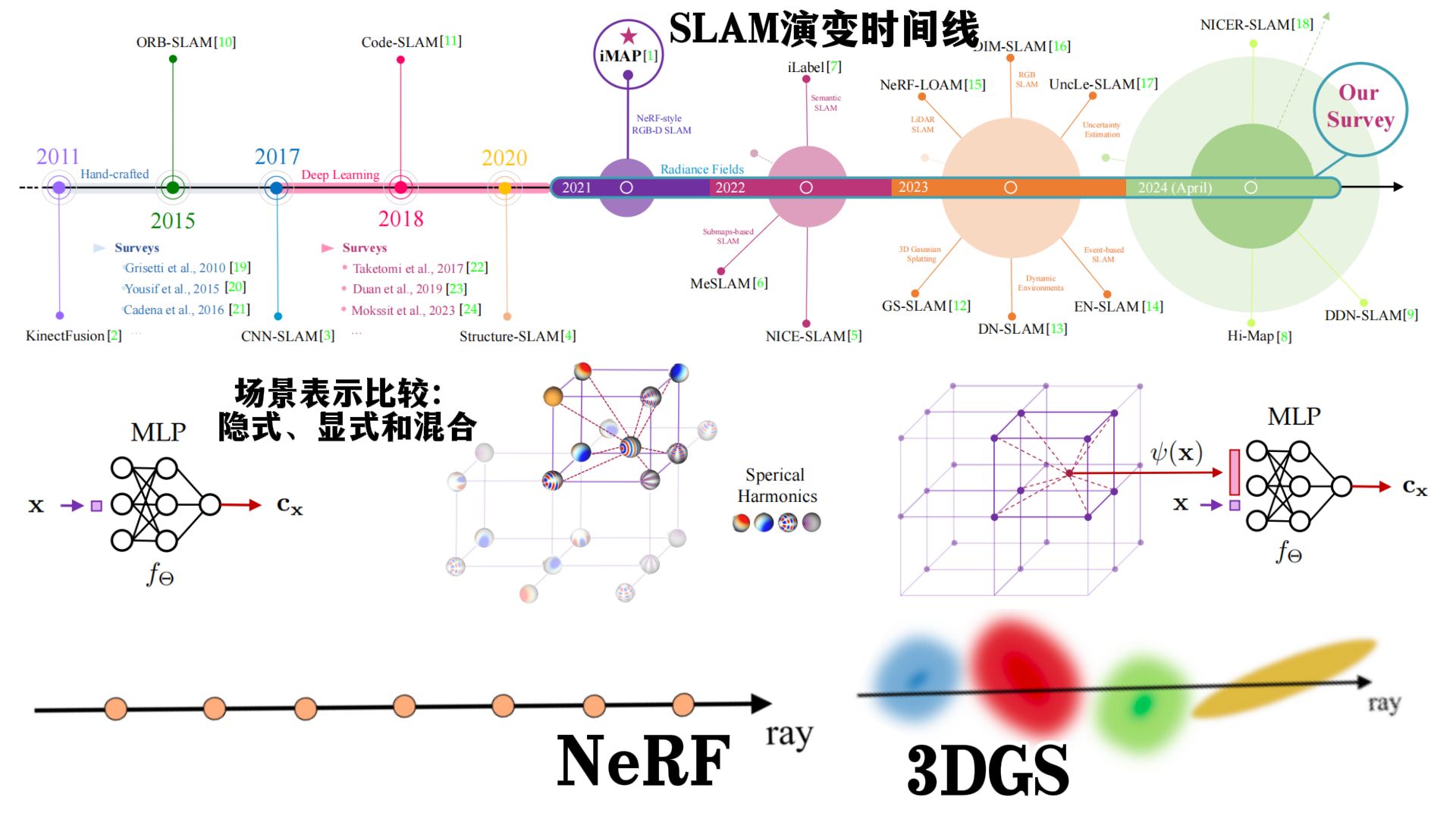
首个关于NeRF与3DGS如何重塑SLAM的最新综述,旨在为初学者和资深专家提供重要的指南
发布人
这篇文章综述了SLAM领域在过去二十年的显著演变,特别是近期在NeRF和3DGS表示方面的进展。文章回顾了从手工设计的方法到深度学习时代,再到最近的辐射场进展,揭示了大量新兴的文献。通过结构化的分类和分析,该综述突出了SLAM方法的关键局限性和创新点,提供了关于跟踪、建图和渲染的对比结果,并指出了当前的开放挑战。这篇综述旨在为初学者和资深专家提供重要的指南。 标题:How NeRFs and 3D Gaussian Splatting are Reshaping SLAM: a Survey 链接:https://arxiv.org/html/2402.13255v2
打开封面
下载高清视频
观看高清视频
视频下载器
清华最新综述:第一个专门针对NeRF在自动驾驶领域应用的调查,旨在弥补当前文献中存在的明显空白
巴黎奥运会一大亮点
我就说AI永远不可能战胜人类
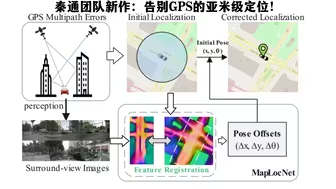
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
3D高斯泼溅技术落地需要解决哪些问题?
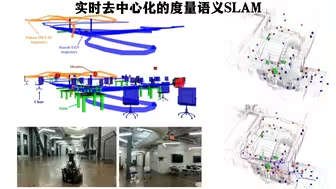
异构机器人无GPS协作!宾大重磅推出SlideSLAM:实时去中心化的度量语义SLAM
超越所有SOTA!3DGS结合NeRF到4DGF 重塑动态城市场景新视图合成
清华大学孙富春教授团队 综述:触觉感知在机器人灵巧操作中的应用与进展
无需SLAM算法,直接生成Gazebo仿真环境对应的高质量真值地图的工具 pgm_map_creator,手把手逐步详细讲解安装部署和使用方法【开源】
关于3DGS的最新综述,3D重建与新型视图合成
ICRA 2024 最佳学生论文奖 | NoMaD:基于Transformer用于 导航和探索的目标掩蔽扩散策略
NeRF在机器人技术中 应用的最新综述,旨在为 该领域提供重要参考指南
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
关于3D Gaussian Splatting SLAM的又一最新开源力作推出,LIV GaussMap:用于实时3D辐射场地图渲染的激光雷达、惯性、视觉融
跨域无人军团出征 清华 | LVCP 无需精确先验,基于密切集成 的协同实时相对定位
人 工 智 障
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
与人工智能相关的十大就业岗位,你最想踏入的是哪一个
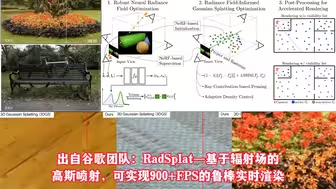
出自谷歌团队,RadSplat: 基于辐射场的高斯喷射,可实现 900+ FPS 的鲁棒实时渲染
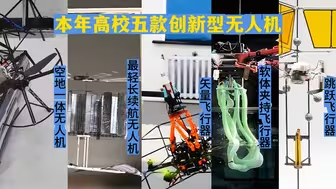
我国高校今年发表的五篇关于无人机的创新性研究成果,每篇都是被顶刊录入的存在!
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
上海交大邹丹平团队的最新开源力作,Ground-Fusion:一种对极端情况具有鲁棒性的低成本地面 SLAM 系统。
NeRF系列公开课01 | 基于NeRF的三维内容生成
UCSD、MIT华人团队开源Open-TeleVision:沉浸式体验跨越3000里的机器人远程操作。
[RA-L2023] CamMap:基于SLAM地图对齐方式的非重叠视场相机的外参标定
浙大最新开源!HVOFusion:使用混合体素八叉树进行增量网格重建
多伦多大学等发布!面向LiDAR点云的无监督目标检测
研一在读,导师让学自动驾驶环境感知?有这45篇经典论文就够了!
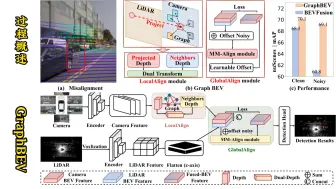
超越BEVFusion!GraphBEV:解决多模态特征不对齐和噪声问题,助力量产
中国科学技术大学-MM-Gaussian:多模态室外3DGS SLAM
近20年编程语言热度排名 | 数据可视化
SA-GS:在3D高斯抛雪球中实现SAM任意物体分割,无需任何训练过程和学习参数,通过交互式过程实现3D高斯抛雪球物体分割
四轮四转,横行斜行,定位+规控
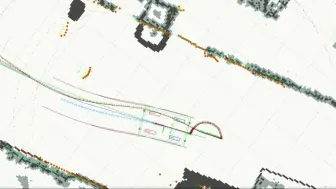
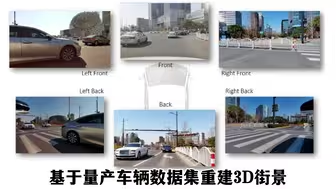
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
用AI续写新闻联播片头曲,没想到燃成这样
智行者SLAM专家高翔博士:室内无人车和室外无人车有什么区别?
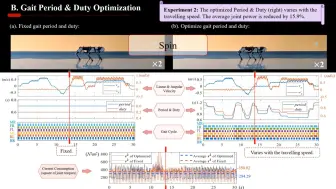
上海交通大学高峰教授团队:六足机器人步态优化框架,让足式机器人像哺乳动物一样行走
Nvidia Instant NeRF-建模师即将失业?
高翔SLAM报告:开阔高动态区域的激光融合定位