V
主页
SLAM在机器人与自动驾驶领域的从业探讨 | 圆桌论坛
发布人
圆桌论坛嘉宾 崔彧玮,汤恩科技CEO/创始人。中国科学技术大学少年班物理学士学位,24岁博士获得美国马里兰大学认知与神经科学博士学位。曾主导研发出国内首台具有视觉导航的家用扫地机器人,主导撰写T/CVIA 64-2018《室内机器人视觉同步定位与地图构建技术规范》。荣获胡润30岁以下创业领袖,先进制造业代表。X·36Under36——2022年度S级创业者之一。 陶醉,高德算法专家。2010年本科毕业于吉林大学车辆工程专业。2016年博士毕业于法国贡比涅技术大学。博士课题为基于低成本传感器的自动驾驶定位系统,研究成果发表于IROS,JFR,IEEE T-IV等国际会议和期刊。2017年入职高德地图,从事视觉定位/三维重建算法工作,具有多年高精地图数据生产及应用经验。 许凌云,美国卡耐基梅隆大学博士后,中国科学院沈阳自动化研究所博士。具有多年无人驾驶经验,曾获得ACM亚洲区域赛银牌。在RSS、ICRA、IROS、RAL、TIP等发表多篇论文。 杨盛,追觅科技算法工程师,清华大学硕士。在校期间研究无人机导航与定位技术;入职追觅科技后,负责室内机器人视觉定位与建图算法设计和开发。
打开封面
下载高清视频
观看高清视频
视频下载器
LIO系统的改进及其在自动驾驶定位模块中的应用 | 高翔
融合人与环境的激光雷达三维动态场景感知 | 王程
动态视觉与SLAM:在线学习的途径 | 査红彬
SLAM with Event-based Vision Sensors: Past, Present, and Future | 周易
AR光波导的应用与发展 | 郑昱
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L1 Apollo架构
NeRF系列公开课02 | 基于NeRF的三维场景重建和理解
【直播精彩回顾】算法工程师求职沙龙--移动机器人&无人驾驶专场
算法岗的招聘现状与未来——移动机器人与自动驾驶专场
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)
【高清中文】ORB_SLAM2源码解析
自动驾驶规划算法岗高频面试题详解
移动机器人运动规划
视觉SLAM开源代码论文带读(ORB_SLAM2)
视觉SLAM开源代码论文带读(DSO)
带 SLAM 和 Nevegation2 的 ROS2
自主机器人技术线上研讨会第一期:嘉宾仲星光,报告:基于隐式神经表示的LiDAR SLAM
【开源】低成本DIY自动驾驶小车
2023年人工智能领域最不卷的岗位深度加速与压缩,很多人还没发现
面向移动机器人的道路环境感知-范睿/同济大学教授
【论文解读】外网大佬解读NeRF神经辐射场原理
NeRF系列公开课07 | 在非理想输入下NeRF的重建
外滩大会2024圆桌讨论:AI的「杀手级」应用什么时候出现?
深度学习与视觉SLAM
NeRF系列公开课06 | 高动态范围神经辐射场—HDR-NeRF
大疆livox-mid360室外定位
人工智能科普 | 带你全方位了解人工智能行业
SLAM与三维重建的区别
MIT Robotics - Neural certificates in large-scale autonomy design
沐神在交大讲座全过程
数字图像处理
Google 前 CEO 埃里克·施密特在斯坦福2万字讲座实录:AI明年三大趋势,第一个趋势将彻底改变你获取信息的方式
【中英精校】英伟达CEO黄仁勋最新高盛大会访谈 2024.9.12
【中英+笔记】对话《人类简史》作者尤瓦尔·赫拉利:人工智能将在2034年控制你|2024.09.05
来自民间的30项关于特斯拉FSD v12版本 以上的实测,带你深度感受端到端 自动驾驶技术线路的优缺点
半正定规划实用指南(2)
智行者SLAM专家高翔博士:室内无人车和室外无人车有什么区别?
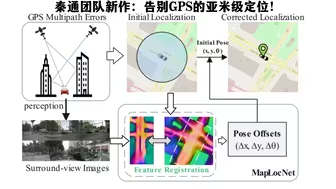
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
DeepMind训练AI踢足球,技术精湛堪比真人
4位大佬浅谈自动驾驶行业的未来及发展