V
主页
08_ROS话题通信3:订阅与发布结合控制小车
发布人
源码地址:https://github.com/Grizi-ju/ros_program 围绕四大通信方式(Topic、Service、Action、Param)的编程实操小项目,适合初学者入门ROS编程 包含: Topic:创建一个发布者、订阅者、二者结合; Service:生成多只乌龟、开关触发小车运动; Action:单目标点导航、多点巡航、调参; Param:参数通信...
打开封面
下载高清视频
观看高清视频
视频下载器
09_ROS话题通信4:PID思想使机器人沿墙行驶_wall_following
06_ROS话题通信1:从控制乌龟画圆到控制真车
16_ROS动作通信3:导航简单调参效果
ROS中自定义全局规划器(下)_代码说明
改进A星算法(一)基础代码详解
10_ROS话题通信总结:理解传感器与执行机构
01_ROS编程系列大纲_【机器人方向师兄分享】
ROS中实现A星与JPS三维路径规划_C++
ROS中自定义全局规划器(上)_算法部署
03_ROS的作用及学习技术路线
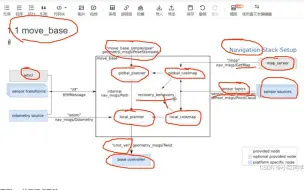
13_ROS动作通信1:move_base框架
盲审通过,毕业快乐!
使用自定义RRT*全局规划器建图导航
改进A星算法(五)贝塞尔曲线平滑
05_ROS中写代码的正确打开方式
12_ROS服务通信案例2_触发控制小车运动C++
A星寻路算法详解(下)_matlab代码实现(超详细!)
改进A星算法(四)搜索邻域
02_机器人研究方向梳理
A星寻路算法详解(上)_matlab基础(超详细!)
改进A星算法(六)双向搜索【直播带改】
在我家户型图上跑个RRT*全局规划器!
改进A星算法(二)启发函数
秋招总结1
【超详细】遗传算法(下)_matlab代码实现
在ROS仿真环境中写一个PID控制器(上)_python
张雪峰说的太对了:学计算机,不该吃的苦,别吃!听劝,毕业无缝衔接上岸!
pure_pursuit纯轨迹跟踪算法在F1TENTH仿真赛道中的简单应用
有点炸裂!2分钟教你一个巨好用的录音背书法!保你背过的知识点再也忘不了!
AI编程助手,开发上位机利器【编程插件】
英语突然开窍是什么感觉?
版面分析模型结合Qwen2-VL-7B,大幅提升gptpdf解析效果,代码实现更简洁、更高效
教辅推荐66|众所周知,好的小众教辅在同学之中不流通|《侦探笔记》语文
加油
电子信息工程大学四年买了多少开发板?聊聊我和开发板的故事
独家揭秘!原来这才是你看不懂大学教材的真相
专治不想学习|如何让学习像游戏一样上瘾?
世界公测有效的背书方法!三天背完一本书真的绝!
学计算机不去接单就太可借了,有了这几个接单平台,暑假躺着就能赚钱!!
《黑神话·悟空》是用什么编程语言开发的?为什么难以破解?