V
主页
16_ROS动作通信3:导航简单调参效果
发布人
以前的视频,简单调参之后效果,调大膨胀半径、速度等,无声音
打开封面
下载高清视频
观看高清视频
视频下载器
09_ROS话题通信4:PID思想使机器人沿墙行驶_wall_following
14_ROS动作通信2:代码实现导航至目标点
15_ROS动作通信3:机器人多目标点巡航
在ROS仿真环境中写一个PID控制器(下)_C++
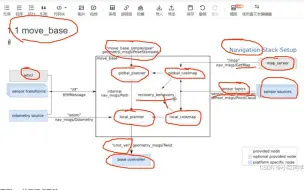
13_ROS动作通信1:move_base框架
03_ROS的作用及学习技术路线
使用自定义RRT*全局规划器建图导航
06_ROS话题通信1:从控制乌龟画圆到控制真车
11_ROS服务通信案例1:生成多只乌龟C++
08_ROS话题通信3:订阅与发布结合控制小车
10_ROS话题通信总结:理解传感器与执行机构
01_ROS编程系列大纲_【机器人方向师兄分享】
12_ROS服务通信案例2_触发控制小车运动C++
【白嫖】PMSM永磁同步电机参数辨识仿真模型
05_ROS中写代码的正确打开方式
ROS中自定义全局规划器(下)_代码说明
盲审通过,毕业快乐!
在ROS仿真环境中写一个PID控制器(上)_python
基于手势检测控制灵巧手【仿真】
pure_pursuit纯轨迹跟踪算法在F1TENTH仿真赛道中的简单应用
02_机器人研究方向梳理
改进A星算法(一)基础代码详解
ROS中自定义全局规划器(上)_算法部署
Robomaster哨兵motion planning仿真效果演示
改进A星算法(五)贝塞尔曲线平滑
来鸡窝做机器人实验
07_ROS话题通信2:订阅里程计传感器数据
天之博特迷你机器人Tianbot_mini开箱,太可爱了!
人形双足模仿学习强化学习AMP ASE Exbody求助
ROS 人脸检测的 Python 实现
具身智能:怎么就是人工智能下一个浪潮?
【超详细】遗传算法(下)_matlab代码实现
开源低成本四足机器人—Dingo
改进A星算法(三)权重系数
RM 全阵容兵种导航建图避障仿真方案
ROS 颜色目标识别与定位的 Python 实现
UE5 AI行为树 游戏NPC 自主寻找最佳掩体 算法 红蓝对抗 兵棋推演仿真 班组作战 单体Agent 环境感知 二次开发 导航网格 Demo
ANSYS WB 拉伸断裂仿真
ROS 相机图像获取的 Python 实现
四足机器人跌落姿态调整 基于强化学习的机器人控制