V
主页
盲审通过,毕业快乐!
发布人
毕业论文AGV实验部分,模型设计、硬件实物搭建、软件开发、路径规划,最后一部分QT界面没录进来,盲审通过,毕业快乐!
打开封面
下载高清视频
观看高清视频
视频下载器
Mirobot_ROS_01介绍_1
14_ROS动作通信2:代码实现导航至目标点
基于多智能体强化学习的多小车建图与导航
【超详细】遗传算法(下)_matlab代码实现
Plant Simulation 四向车立体库仿真小案例(类似AGV)
工厂升级必看!四个维度判断工厂是否适合AGV小车!
ROS中自定义全局规划器(上)_算法部署
15_ROS动作通信3:机器人多目标点巡航
16_ROS动作通信3:导航简单调参效果
08_ROS话题通信3:订阅与发布结合控制小车
C6-2智能车的建图与自主实现教程
ROS机器人自动驾驶,自主导航巡检车可作为高校车辆工程、智慧交通、自动化等多专业的实践教学工具
06_ROS话题通信1:从控制乌龟画圆到控制真车
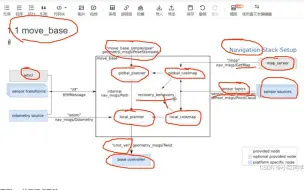
13_ROS动作通信1:move_base框架
使用相机在ROS下的TensorRT量化推理yolo模型以及使用BYTEtrack算法进行目标跟踪部分的更新
作为 ROS1 开发人员学习 ROS2 并迁移您的 ROS 项目
基于stm32和ros串口通信,利用moveit进行路径规划,将轨迹送给stm32执行,带动机械臂运动
使用自定义RRT*全局规划器建图导航
在ROS仿真环境中写一个PID控制器(上)_python
秋招总结2
【超详细】遗传算法(上)_求解01背包问题理论
10_ROS话题通信总结:理解传感器与执行机构
【开源无人船】从零组装一艘开源ROS无人船
03_ROS的作用及学习技术路线
11_ROS服务通信案例1:生成多只乌龟C++
基于yolo和moveit的图像识别机械臂目标抓取搬移
【2024年8月最新chatgpt】GPT4.0免费使用教程,免登录就可以直接使用
如何区别RGV、AGV与IGV
路径平滑|基于共轭梯度法的轨迹优化(ROS C++/Python)
图睿轮式人形机器人 | 销售电话18268017403
【24105期大乐透预测】9.9开奖,今晚目标一等奖
多项全能,无所不能!AGV的多行业应用
失业在家不要怕,你就死磕这4个网站!
基于ros路径规划+避障演示
调车总不能炸机了吧(●'◡'●)
坦白说:二本普通家庭考公,真的没必要,真没必要吃这样的苦......
基于STM32单片机循迹遥控智能机器人机械臂AGV小车
ROS中实现A星与JPS三维路径规划_C++
2025工创赛物流搬运机器人 赛事解读与问题分析2
【劝退】自学StableDiffusion能救一个是一个!这里面的水可深了!人工智能大佬专为零基础研制的StableDiffusion教学教程,太牛了!AI绘图