V
主页
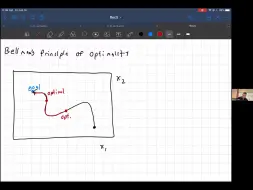
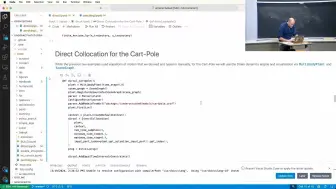
MIT 欠驱动机器人学 2024 第 5 讲 Acrobots, Cart-poles, and Quadrotors I
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
实时最优控制讲座 —— 最优控制机器人软件
斯坦福机器人讲座 —— 机器人技能获取: 策略表示和数据生成
UCSD 机器人讲座 —— 人形机器人的关键技术 + 基于模型 VS 学习的控制
CMU 最优控制 2024 第一讲
MIT 欠驱动机器人学 2024 第 10 讲 Trajectory Optimization I
CMU 最优控制 2024 第 18 讲 随机最优控制和 LQG
波士顿动力 Predictably Spot-On Industrial Inspection Boston Dynamics
MIT 欠驱动机器人学 2024 第11 讲 轨迹优化 II
MIT 欠驱动机器人学 2024 第 7 讲 Lyapunov Analysis I
斯坦福机器人讲座 - Flying Robots Exploring Hybrid Locomotion and Physical Interaction
CMU 最优控制 2024 第 13 讲 Dealing with 3D Rotations
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
CMU 最优控制 2024 助教补充 第 1 讲 ODE 与线性化
UIUC 机器人讲座 —— 机器人学习:通过理解第一视角视频(Robot Learning by Understanding Egocentric Video)
MIT 欠驱动机器人学 2024 第 9 讲 Computing Lyapunov Functions II
CDC 2023 Workshop on Open-Source Code
MIT 欠驱动机器人学 2024 第 6 讲 动态规划 III
CMU 最优控制 2024 助教补充 第 5 讲 动态规划与 MPC
密歇根大学机器人讲座 —— 机器人学中的高效通用算法
MIT 欠驱动机器人学 2024 第12 讲 轨迹稳定 I
2024 斯坦福 凸优化教程 Stephen Boyd 第三讲
MATLAB - Robust Control(鲁棒控制) 官方出品
实时最优控制讲座 —— TrajectoryOptimization.jl 教程
意大利 IIT 讲座 —— 结合学习和模型预测控制的机器人安全控制
EPFL 四足机器人研究 —— ManyQuadrupeds: 多种类四足机器人学习运动策略(ICRA 2024)
CMU 最优控制 2024 第 9 讲 凸 MPC
MIT 欠驱动机器人学 2024 第 4 讲 动态规划 II
实时最优控制讲座 —— 从航空航天的角度
CMU 最优控制 2024 助教补充 第 9 讲 稀疏轨迹优化
【LeRobot】中文字幕|Diffusion Policy: LeRobot Research Presentation 2 by Cheng Chi
ETHZ 研究:RL + 基于模型的控制: 利用按需最优控制学习灵活四足运动
宾大机器人讲座 —— 多接触操作中的学习与控制
斯坦福大学 Khatib 讲座 —— 深海机器人探索
IROS 2023 基于模型的多接触操作
IROS 2023 讲座 —— 从基于模型的全身控制到利用 ML 进行足式人形机器人操作
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
西北大学机器人讲座 —— 机器人学习的控制原理
2024 斯坦福 凸优化教程 Stephen Boyd 第 10 讲
【LeRobot】中文字幕|OpenVLA: LeRobot Research Presentation 5 by Moo Jin Kim