V
主页
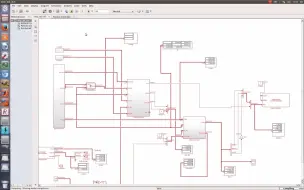
用于姿态估计的传感器融合算法 6DOF
发布人
网络
打开封面
下载高清视频
观看高清视频
视频下载器
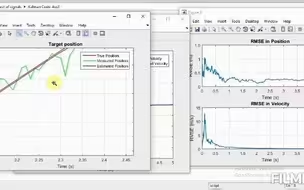
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
移动自主机器人中的传感器融合| IMU+车轮里程计
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
用于汽车 GPS 和加速度计的卡尔曼滤波器传感器融合
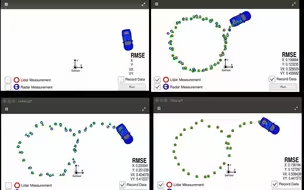
使用基于传感器融合的扩展卡尔曼滤波器进行对象跟踪
A星融合DWA的路径规划算法实现静态避障碍及动态避障matlab A*
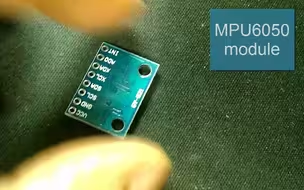
6自由度和9自由度传感器与Madgwick滤波器、MPU6050、HMC5883L(GY-86模块)融合
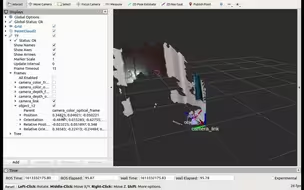
使用Realsense深度相机从点云进行目标检测和3D姿态估计
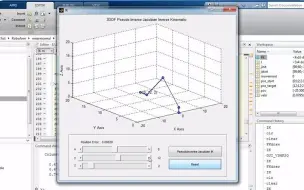
使用伪逆雅可比方法的 3DOF 逆运动学 - Matlab 仿真
用于异常检测的 LSTM 自动编码器
使用 MATLAB 进行姿态估计(扩展卡尔曼滤波器,MPU9250)
【目标追踪与姿态估计实战】迪哥半天就教会了我OpenPose算法!原理详解+项目实战,究极通俗易懂!(人工智能/AI/计算机视觉/深度学习)
使用 MATLAB 进行 3DOF 并联机器人仿真 [Roll-Pitch-Heave]
用于移动目标跟踪的卡尔曼滤波器(MATLAB)
ROS Gazebo 上带有 5 DOF 模拟视频的漫游者
Denavit-Hartenberg 正向运动学 3DOF - Python - PyQt5 GUI 和 Qt Designer
使用 Denavit-Hartenberg 的 3DOF 正向运动学 - Matlab 仿真(MeArm 模型)D-H参数
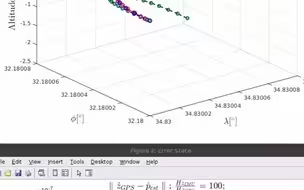
INS/GPS 导航系统上的扩展卡尔曼滤波器在 1:100 IMU/GPS 融合比下在线演示 EKF 完整估计性能
RRT 路径规划算法滑模非线性控制器用于将机器人稳定在所需的配置
将 Matlab/Simulink 与 V-REP 接口,以轻松开发机器人平台基于传感器的控制算法
基于扩展卡尔曼滤波器 (EKF) 和 UWB 传感器和摄像头的无人机定位
来自 IMU 传感器的 Roll Pitch Yaw 并在 RVIZ ROS 中对其进行可视化 | MPU6050
用于光伏 (PV) 系统的并网逆变器simulink仿真建模过程模型
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
如何使用 Arduino 和 MPU6050 陀螺仪和加速度计传感器测量角度
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
基于多目标粒子群算法的微电网优化matlab算法
Carsim 中用于路径跟踪的非线性模型预测控制与 Stanley nmpc
EKF SLAM 扩展卡尔曼滤波slam的matlab算法
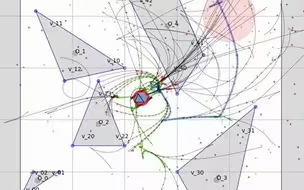
使用粒子滤波器进行自我位置估计的操作检查算法
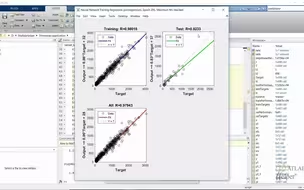
使用时间序列神经网络进行数据预测matlab算法程序
三相可控整流器用于控制直流电机的转速matlab simulink仿真
脉冲多普勒雷达模拟器matlab仿真算法
用于高分辨率图像实时语义分割的 ICNet
线性最小二乘估计的MATLAB程序| [估计与跟踪]
用于数据交换的 MATLAB 和 LabVIEW 接口
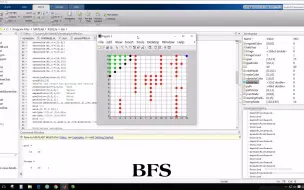
在 Matlab 中可视化 深度优先搜索 (DFS) 和广度优先搜索 (BFS) 算法
Carsim 中用于路径跟踪的非线性模型预测控制( NMPC )与 Stanley
并联式混合动力汽车能量管理动态规划的实现matlab算法
一维高斯滤波器去除噪声matlab程序实现