V
主页
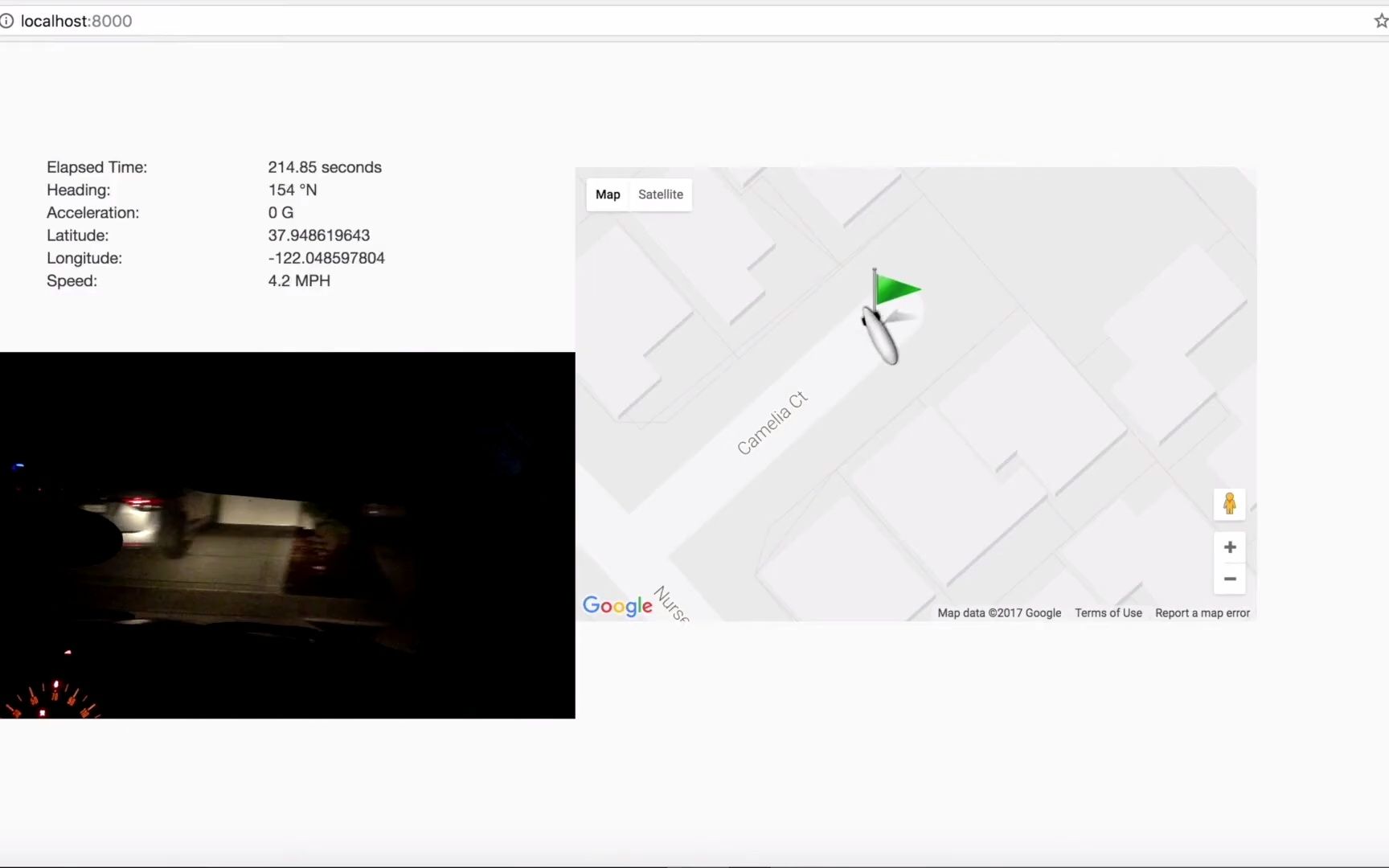
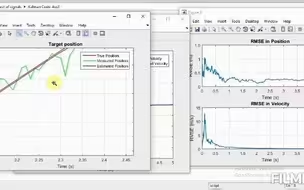
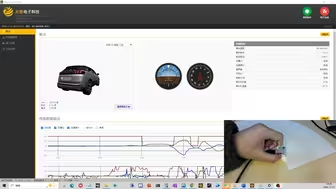
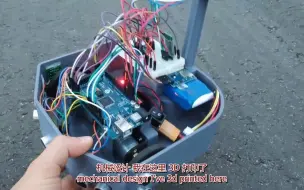
用于汽车 GPS 和加速度计的卡尔曼滤波器传感器融合
发布人
网络
打开封面
下载高清视频
观看高清视频
视频下载器
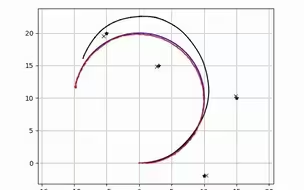
使用扩展卡尔曼滤波器 (EKF) 进行传感器融合定位
卡尔曼滤波器 GPS(蓝线:实际轨迹。蓝点:GPS 信号,红线:估计轨迹)
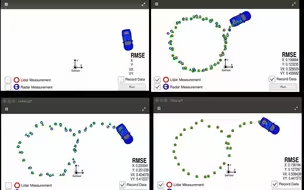
使用基于传感器融合的扩展卡尔曼滤波器进行对象跟踪
使用扩展卡尔曼滤波器的用于自身位置估计的操作确认算法
用于姿态估计的传感器融合算法 6DOF
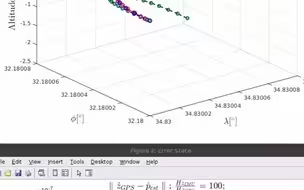
INS/GPS 导航系统上的扩展卡尔曼滤波器在 1:100 IMU/GPS 融合比下在线演示 EKF 完整估计性能
移动自主机器人中的传感器融合| IMU+车轮里程计
用于移动目标跟踪的卡尔曼滤波器(MATLAB)
基于扩展卡尔曼滤波器 (EKF) 和 UWB 传感器和摄像头的无人机定位
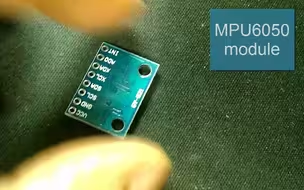
如何使用 Arduino 和 MPU6050 陀螺仪和加速度计传感器测量角度
使用 MATLAB 进行姿态估计(扩展卡尔曼滤波器,MPU9250)
EKF SLAM 扩展卡尔曼滤波slam的matlab算法
基于扩展卡尔曼滤波器ekf的 SLAM
【全面精讲】B站最好的卡尔曼滤波课程,计算机博士带你不再走弯路!
来自 IMU 传感器的 Roll Pitch Yaw 并在 RVIZ ROS 中对其进行可视化 | MPU6050
显一个有意思的IMU,3D姿态好评
【从放弃到精通】目标追踪—计算机博士精讲卡尔曼滤波算法教程 卡尔曼滤波从理论到实践(深度学习/计算机视觉/物体检测/目标跟踪/AI)
带 R_L (GPS,İMU,ODOM) 和 teb planner 的两轮机器人
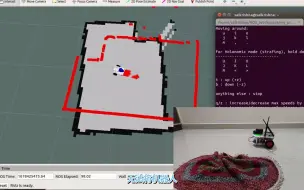
使用扩展卡尔曼滤波器在 MATLAB 中生成的 SLAM 模拟。该实现从激光扫描匹配和车轮里程计生成两个运动估计
Arduino GPS 机器人,回家和航点驾驶
用于数据交换的 MATLAB 和 LabVIEW 接口
6自由度和9自由度传感器与Madgwick滤波器、MPU6050、HMC5883L(GY-86模块)融合
自驾车ROS实践 - Self Driving and ROS – Learn by Doing! Odometry & Control
A星融合DWA的路径规划算法实现静态避障碍及动态避障matlab A*
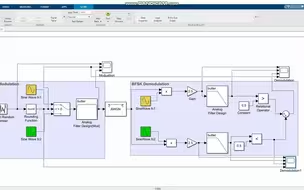
Simulink 中的幅度调制 - AM 调制 | Matlab 仿真教程 2017
用于异常检测的 LSTM 自动编码器
SAM-based MultiModal Sensing for Underwater Targets
三相可控整流器用于控制直流电机的转速matlab simulink仿真
纯跟踪转向控制和PID速度控制的路径跟踪仿真
第 1 部分:MATLAB 中的蒙特卡罗模拟(教程)
matlab使用simulink调制解调ask fsk psk qpsk tdm数字调制
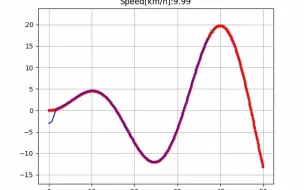
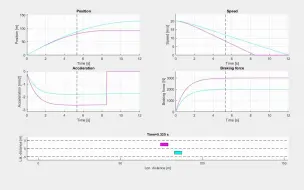
模拟和动画两辆车刹车到停止的位置、速度、加速度和制动力图
AM 调制:使用 Simulink 的调制器和解调器
太阳能电池模拟matlab simulink
在Matlab Simulink 中绘制直流电机特性| Matlab Simulink 直流电机仿真
【18岁生贺手元|Rotaeno】Nyarlathotep's Dreamland Lv.12+ 加速度计3小ap
使用粒子滤波器进行自我位置估计的操作检查算法
使用 Arduino 控制步进电机 - 教程
DARP 算法 - 优化多机器人覆盖路径规划的划分区域算法
Walsh-Hadamard 变换(信号过滤和图像压缩) 阿达马变换matlab算法程序