V
主页
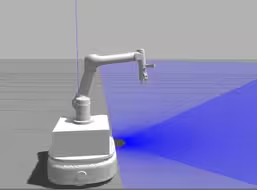
7ROS理论与实践_.Moveit!机械臂控制_视频
发布人
https://www.shenlanxueyuan.com/course/246 可以参考《ros机器人开发实践》 这本书,重新上传 https://www.shenlanxueyuan.com/course/246
打开封面
下载高清视频
观看高清视频
视频下载器
ROS理论与实践_4.机器人仿真_视频
移动机械臂抓取
6.机器人SLAM与自主导航_视频
机械臂协调控制复现
第二章:ROS基础
第三章.机器人系统设计_视频
机器人公司终于来了位00后运营,领导非常放心,大家觉得怎么样?
SLAM算法(浙软夏令营)废柴大学生的所作所为
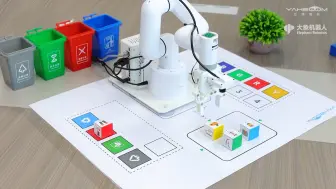
开箱7自由度协作机械臂,AI视觉识别交互,玩转各种AI创意!
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
【ROS】【三维重建】【工程实践】 雷达+深度相机实现深度优先搜索
(开源)哪吒 MiniROS 机器人结构安装视频(ROS2)
IROS复现:基于DDPG的机械臂抓取训练(sim2real)
波士顿动力机器狗Spot扛着宇树机械臂Z1除杂草#机器狗应用
手眼臂合一!亚博智能&大象机器人联手打造,7自由度AI视觉协作机械臂!
无需SLAM算法,直接生成Gazebo仿真环境对应的高质量真值地图的工具 pgm_map_creator,手把手逐步详细讲解安装部署和使用方法【开源】
手眼臂合一!亚博智能&大象机器人联手打造,7自由度AI视觉协作机械臂!
ROS仿真 移动机器人导航 路径规划 运动控制
路径跟踪 | 最优控制LQR算法实现(ROS C++/Python/Matlab)
物理搬运机器人 靶心识别
ROS 人脸检测的 C++ 实现
ROS 颜色目标识别与定位的 C++ 实现
ROS MoveIt规划场景中添加虚拟墙
《基于ROS2的决策规划算法工程开发》实机演示
《松灵ROS 2开讲啦》第三期 ROS 2的URDF编写和Gazebo仿真控制
LLM与ROS(机器人操作系统)
ROS SLAM小车
5.机器人感知
基于ROS的多车道道路环境下的车距保持与自主变道与超车
FR3仿真机+真机MoveIt路径规划 阿凯法奥ROS包(akai-fr-ros)
快速流畅!人工智能ROS小车雷达导航、路径规划、虚拟仿真、slam导航算法
ROS 颜色目标跟随的 C++ 实现
【咋个说】大家对这个mid360呼声很高嘛|做出来演示一下
工创机器人新品出炉
来自深圳的场地道具训练第一弹技术爆料!港科自定义控制器丝滑兑矿!
电赛E题 树莓派写完的 搞了有一会 队友调的机械臂(自己打印的)纯手搓
基于ROS的Ubuntu(20.04版本)环境下的自主导航的简单演示
环境建模|欧式符号距离场ESDF的ROS地图插件实现
[开源了]全球最小的桌面级双轮足机器人(开源地址在视频简介)
强化学习导航:仿真环境训练及ROS实车部署