V
主页
京东 11.11 红包
2N1-流体Fluid节点及浸没属性immersionProperties节点-水下机器人仿真
发布人
本upQQ 3195845984,欢迎讨论交流,获取学习资料
打开封面
下载高清视频
观看高清视频
视频下载器
4-1机器人速度雅可比矩阵
2-1位置和姿态的表示
实例:Webots仿真水面水下船只竞速
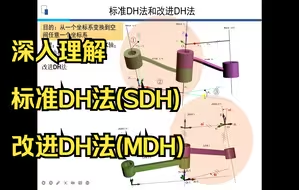
深入理解标准DH法(SDH)和改进DH法(MDH)
多个机器人使用相同的控制器程序
40 Webots两轮差分机器人
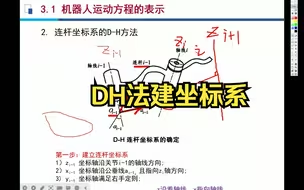
3-3DH法建坐标系
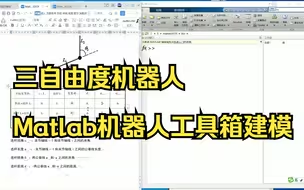
3-14三自由度机器人Matlab机器人工具箱建模
4-2机器人速度雅克比矩阵与速度分析
02-1 Webots安装
使用Webots进行串联机器人仿真
4-5机器人雅克比矩阵的建立
3-1移动机器人运动学建模-序
3-19六自由度机器人Matlab机器人工具箱建模
2-Matlab基本操作
55-Coppeliasim与Matlab连接
7-1机器人控制系统的特点及控制方式
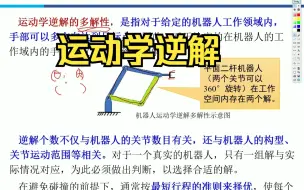
3-11运动学逆解
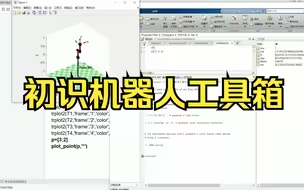
2-初识机器人工具箱
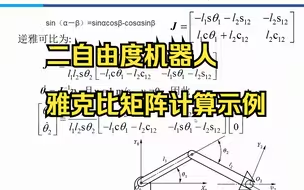
4-3二自由度机器人雅克比矩阵计算示例
技术实例-外部机器人模型导入Coppeliasim(由模型生成关节)
21-01Webots节点:初识ContactProperties
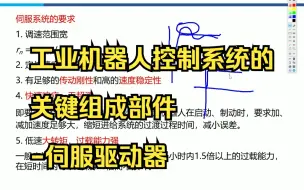
7-7工业机器人控制系统的关键组成部件-伺服驱动器
02-02 Webots的Python环境准备
3-12运动学逆解示例:PUMA560
3-0机器人模型及连杆
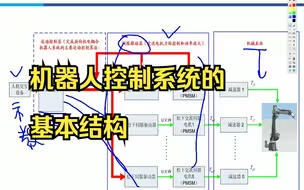
7-2机器人控制系统的基本结构
流体力学基本方程推导
12-Webots里urdf文件的导入和导出
11 Webots向导
27-01 Webots节点:滑动关节参数对比示例
3-15三自由度机器人Matlab机器人工具箱robot.plot4个位姿
实例:将Solidworks文件导入到Webots2022b 2022a
2-2坐标变换
1-FLUENT流体项目工程仿真思路和方法
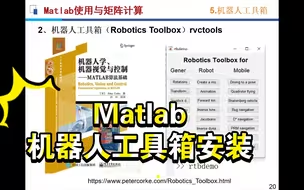
matlab机器人工具箱安装
4-10机器人的静力分析
开启流体动力技术新纪元_Hacck博士
7-6工业机器人控制系统的关键组成部件-电机
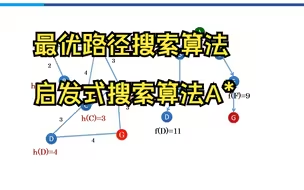
4-16最优路径搜索算法-启发式搜索算法A星