V
主页
京东 11.11 红包
【ICRA2021】3714-How To Train Y our HERON
发布人
在本文中,我们应用深度强化学习(Deep RL)和域随机化来解决仅依赖于2D激光扫描仪的自然环境中的导航任务。我们在模拟中训练了一个基于模型的RL代理,以跟踪湖岸和河岸,并将其应用于零射击设置中的真实无人水面飞行器。我们证明,即使智能体没有在现实世界中接受过训练,它也可以成功地完成任务,并适应机器人环境和动态的变化。最后,我们证明了RL智能体比状态感知模型预测控制器更鲁棒、更快、更准确。
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】3745-SD DefSLAM:用于可变形和体内场景的半直接单目SLAM
【ICRA2021】3756-远程类车车辆的触觉引导路径生成
【ICRA2021】3767-通过增量采样和概率路线图对动态环境进行自主UAV探索
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【ICRA2021】固态激光雷达的轻型三维定位和建图
SLAM为什么需要IMU
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
多传感器融合SLAM松耦合与紧耦合
【ICRA2021】紧密耦合激光雷达视觉惯性里程表的统一多模态地标跟踪
【ICRA2021】基于虚拟磁场的实时路径规划
【ICRA2021】ENCODE:一个深点云里程计网络
轮式里程计激光里程计视觉里程计区别是什么
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2021】3731-用于大规模勘探任务的弹性高效激光雷达重建
【ICRA2021】VelocityNet:点云序列中用于 3D 对象检测的运动驱动特征聚合
【ICRA2021】3485-R-LOAM:利用已知三维参考对象的点到网格特征改进激光雷达里程计建图
【ICRA2021】分层驾驶模型的模仿学习:从连续意图到连续轨迹
【ICRA2021】从模拟中学习,在现实中赛车
【ICRA2021】S3Net:3D LiDAR 稀疏语义分割网络
【ICRA2021】3809-基于优化的视觉惯性SLAM与原始GNSS测量紧密耦合
从Navigation2开始的ROS2生活
【ICRA2021】里程计辅助视觉惯性 SLAM 的双向轨迹计算
【ICRA2021】稀疏噪声点云中的导航空间构建
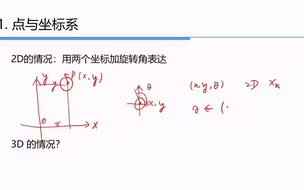
2-1 点与坐标系
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
【ICRA2021】3672-基于多分辨率边界的自主三维勘探规划器
概率机器人
【开源无人船】从零组装一艘测绘无人船
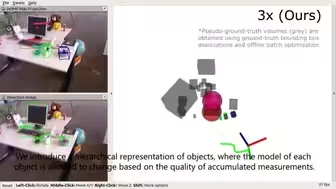
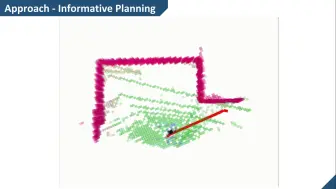
【ICRA2021】3531-在未知环境中学习和规划临时扩展任务
【ICRA2021】高效鲁棒导航的分层目标地图估计
【ICRA2021】3516-BADGR:一种基于自主自我监督学习的导航系统
【开源无人船】ArduPilot飞控连接MAVROS
【ICRA2021】来自范围和语义分割观察的主动贝叶斯多类别建图
为什么需要多传感器融合
【ICRA2021】用于特定领域重定位的同步多级描述符学习和语义分割
【ICRA2021】TT-SLAM:用于平面环境的密集单目 SLAM
模拟红绿灯5.0
【ICRA2021】相机IMU UWB的距离聚焦融合用于精确和减少漂移的定位