V
主页
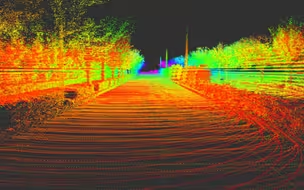
07 自动驾驶中实战基础之点云去畸变与对齐实战.(Camera + LiDAR + Radar + IMU)
发布人
感谢您的支持~ 宝子们可以三连并评论留言:“666”,即可获得up主准备的配套源码PPT。 大纲: 1、3D-3D求解方法; 2、3D-3D原理推导; 3、3D-3D求解实现
打开封面
下载高清视频
观看高清视频
视频下载器
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(上篇)
极快跟踪一切!DOT:无惧遮挡!
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(中篇)
亲测50帧!无需内参!超越Dust3r!Spann3r:无需优化对齐快速进行3D重建!
RA-L 2020:无需专门标定板或视图对齐的相机-激光雷达的校准方法
iKalibr: 统一的多传感器无靶标时空标定
从零搭建一套结构光3D重建系统 [理论+源码+实践]
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
自动驾驶中实战基础之点云去畸变与对齐
GNSS、IMU、Lidar多传感器因子图融合定位效果展示
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
R3LIVE:一个健壮、实时的Lidar-IMU-视觉紧耦合顶尖SLAM框架
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
04 自动驾驶中多传感器信息融合理论(上篇)(Camera + LiDAR + Radar + IMU)(三)
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
港大火星实验室:在线 LiDAR 里程计的高效概率自适应体素映射
无人机悬停不稳怎么办
05 自动驾驶中多传感器信息融合理论(下篇)(Camera + LiDAR + Radar + IMU)
自动驾驶中常用传感器硬件介绍
什么?不做时间同步也可以实现LiDAR-相机三维重建?
大作业|激光-视觉-IMU-GPS融合SLAM算法
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
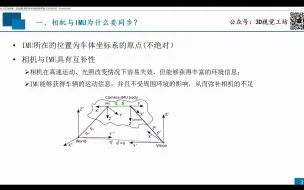
自动驾驶实战课之相机与IMU间的同步实战
06 自动驾驶中实战基础之3D-2D求解方法(PnP系列)[Camera + LiDAR + Radar + IMU]
代码开源!伦敦大学学院:DSP-SLAM:物体特征级SLAM
ICRA2022:全局一致且紧密耦合的 3D LiDAR 惯性建图
04 自动驾驶中多传感器信息融合理论(上篇)(Camera + LiDAR + Radar + IMU)(二)
惯性导航简介
ICCV 2023开源 屠榜Waymo!超强3D目标检测范式DetZero!
神奇!树脂+玻璃+手机就能制作3D全息投影?
【3D视觉工坊】第七期公开课:图像对齐算法
爆火!DepthSplat:连接3DGS和深度估计!
GPS+IMU+3D激光建图
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!
KITTI上准确率第二,具有GPU加速GICP匹配代价因子的全局一致的3D LiDAR映射
CVPR2024开源NetTrack:跟踪高动态物体!
Nature子刊!MARS实验室最新开源:基于LiDAR点流的运动事件检测!