V
主页
自动驾驶实战课之相机与IMU间的同步实战
发布人
如题。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶实战课之多相机间的同步实战
大作业|激光-视觉-IMU-GPS融合SLAM算法
惯性导航简介
Occupancy的工程细节
自动驾驶中的视觉感知技术
BEV与Occupancy网络的全景解析与实战
自动驾驶中的深度学习模型部署实战-CUDA编程优化、profile使用
极快跟踪一切!DOT:无惧遮挡!
自动驾驶中的深度学习模型部署实战-数据预处理NPP库介绍及CUDA编程模型之线程操作
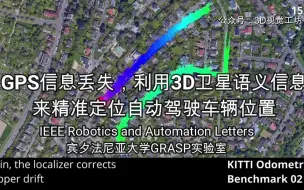
GPS信息丢失,利用3D语义信息来精准定位自动驾驶车辆位置,精度达到10m!
什么?不做时间同步也可以实现LiDAR-相机三维重建?
四旋翼飞行器:算法与实战
BEV&Occ提升颗粒度的方案
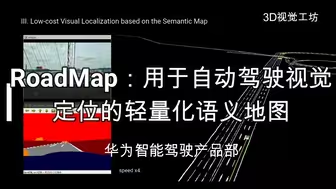
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图
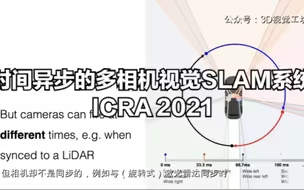
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
无人机|PID算法详解与实战(上)
最新英伟达自动驾驶测试demo,包含距离感知、交通标志检测、运动估计、多相机特征跟踪、以及停车位检测等多项功能
Nature正刊开源!突破低延迟自动驾驶视觉感知!
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
浙大&阿里:用于自动驾驶的大规模神经场景渲染 [AAAI2023]
国内首个面向具身智能方向的理论与实战系统课程
Occupancy Networks后处理
IROS2020,基于航空影像的自动驾驶汽车激光雷达定位
单目深度估计|连续帧方法实战课
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
光学3D测量技术原理及应用
无所不能!OASim基于3D GS的自动驾驶开源和自适应模拟器!
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
无人机-PID算法详解与实战
如何高效学习单目深度估计?
3D线激光相机检测技术解析与应用分享
LVI-SAM代码实战与评估
3D视觉应用-现代智慧农业
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
复杂驾驶中的人机交互!LMDrive:第一个基于LLM的闭环端到端自动驾驶!
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
无需额外训练!SAMPro3D:零样本3D分割一切!
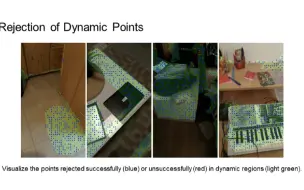
室内动态变化场景中的相机重定位(CVPR2021)
清华&小米汽车最新开源!OccNeRF:基于神经辐射场的自监督多相机占用预测!
清华最新开源万能3D分割一切!