V
主页
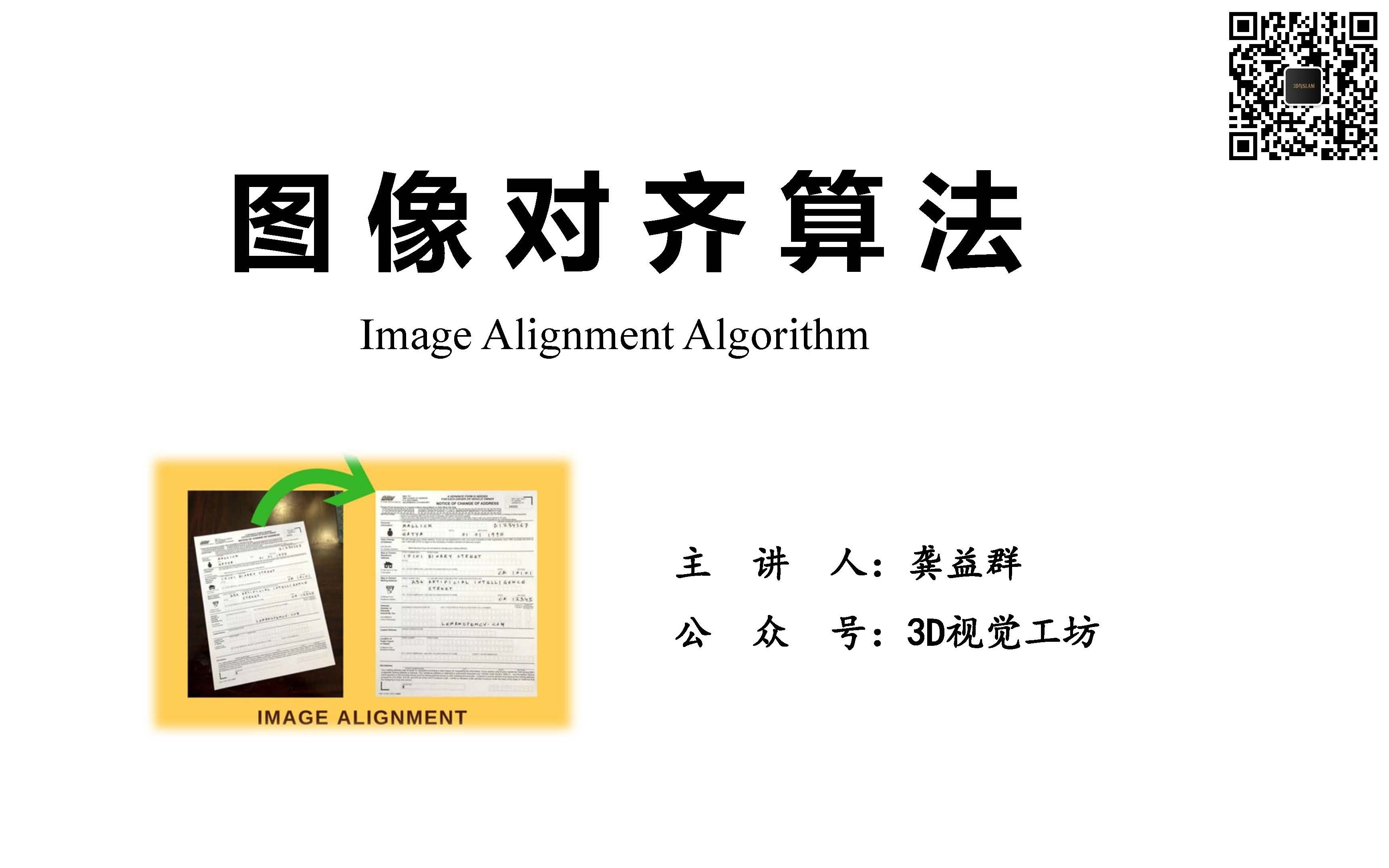
【3D视觉工坊】第七期公开课:图像对齐算法
发布人
主讲内容: 1.Forward Additive Image Alignment(前向加法) 2.Forward Compositional Image Alignment(前向组合) 3.Inverse Compositional Image Alignment(逆向组合) 4.Lucas-Kanade Optical Flow 5.Kanade-Lucas-Tomasi(KLT) Tracker 6.Pyramidal I 主讲人:龚益群,东北大学研究生,研究方向视觉SLAM。
打开封面
下载高清视频
观看高清视频
视频下载器
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
点云配准教程第九讲:彻底弄懂ICP算法(上)
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
【3D视觉工坊】第十六期 视觉惯性SLAM之多约束扩展卡尔曼滤波
安全期可以不带套吗?想要射里面!
小白如何手写g2o优化? 残差构建、雅克比推导、优化函数
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图
B站强推!2024公认最通俗易懂的【AI大模型】教程,24集付费课程(附资料)LLM大模型_RAG_大模型微调_多模态
【Python核心】2024最新版,学完即可就业!拿走不谢,别再走弯路了,学不会我退出IT界
Go!最新NeRF和SLAM结合开源方案!超越NICE-SLAM和DROID-SLAM!
从零搭建一套结构光3D重建系统 [理论+源码+实践]
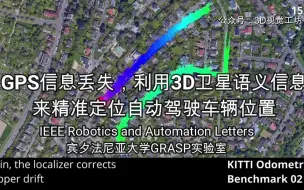
GPS信息丢失,利用3D语义信息来精准定位自动驾驶车辆位置,精度达到10m!
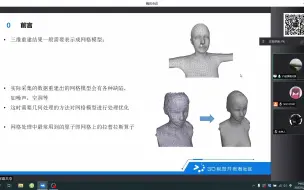
三维重建中的网格处理算法分享(公开课)
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
顶刊论文:LineTR:用于视觉定位的上下文感知线描述符
CVPR'24开源|NeRF-SLAM新SOTA:请任意选择你的高效神经
会为你节省很多时间!入门深度学习的重大误区!怎么正确学习呢?-神经网络/pytorch深度学习
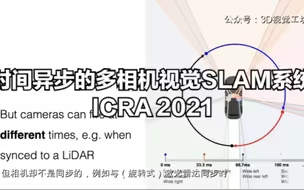
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
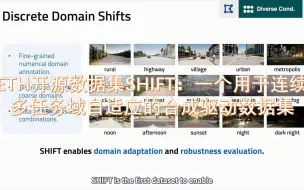
ETH开源数据集SHIFT:一个用于连续多任务域自适应的合成驱动数据集 @3D视觉工坊 #CVPR2022
一个学员拿到了美团和字节两个公司的算法offer,那算法工程师需要具备什么技能,如何系统的学习自动驾驶感知算法?
如何轻松拿捏LIO-SAM-数学基础篇
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
3DGS进化,高效高质量的GaussianPro来袭!
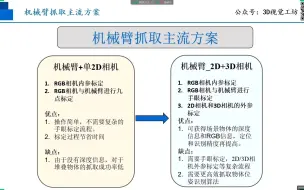
机械臂抓取简介
轻量级道路特征地图(开源了)
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
上交最新开源!仅需4张图像实现高质量3D重建!
吹爆!这可能是导师都不讲的科研进阶课,不愧是国科大博士后!5小时就带我搞定了SCI论文写作!比啃书强太多!
什么?不做时间同步也可以实现LiDAR-相机三维重建?
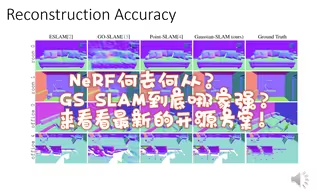
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!
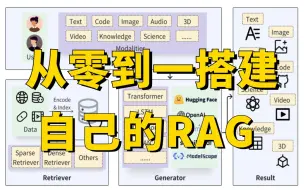
大模型RAG实战:手把手带你从零到一搭建自己的RAG,原理详解+代码精讲,究极通俗易懂!(大模型学习路线/大模型微调/大模型入门)
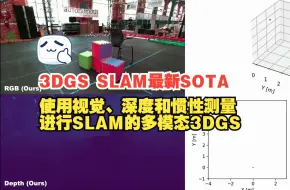
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
新一代标注工具: T-Rex Label 震撼发布!视觉提示检测一切, 一键完成复杂标注!
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!
ECCV2020,循环神经网络自由合成任意视角图像,代码开源!效果惊艳!
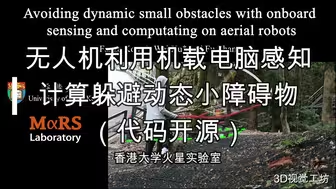
香港大学火星实验室:无人机利用机载电脑感知计算躲避动态障碍物
自动驾驶中的视觉感知技术
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
这绝对是质量最高的单目深度估计开源方案!