V
主页
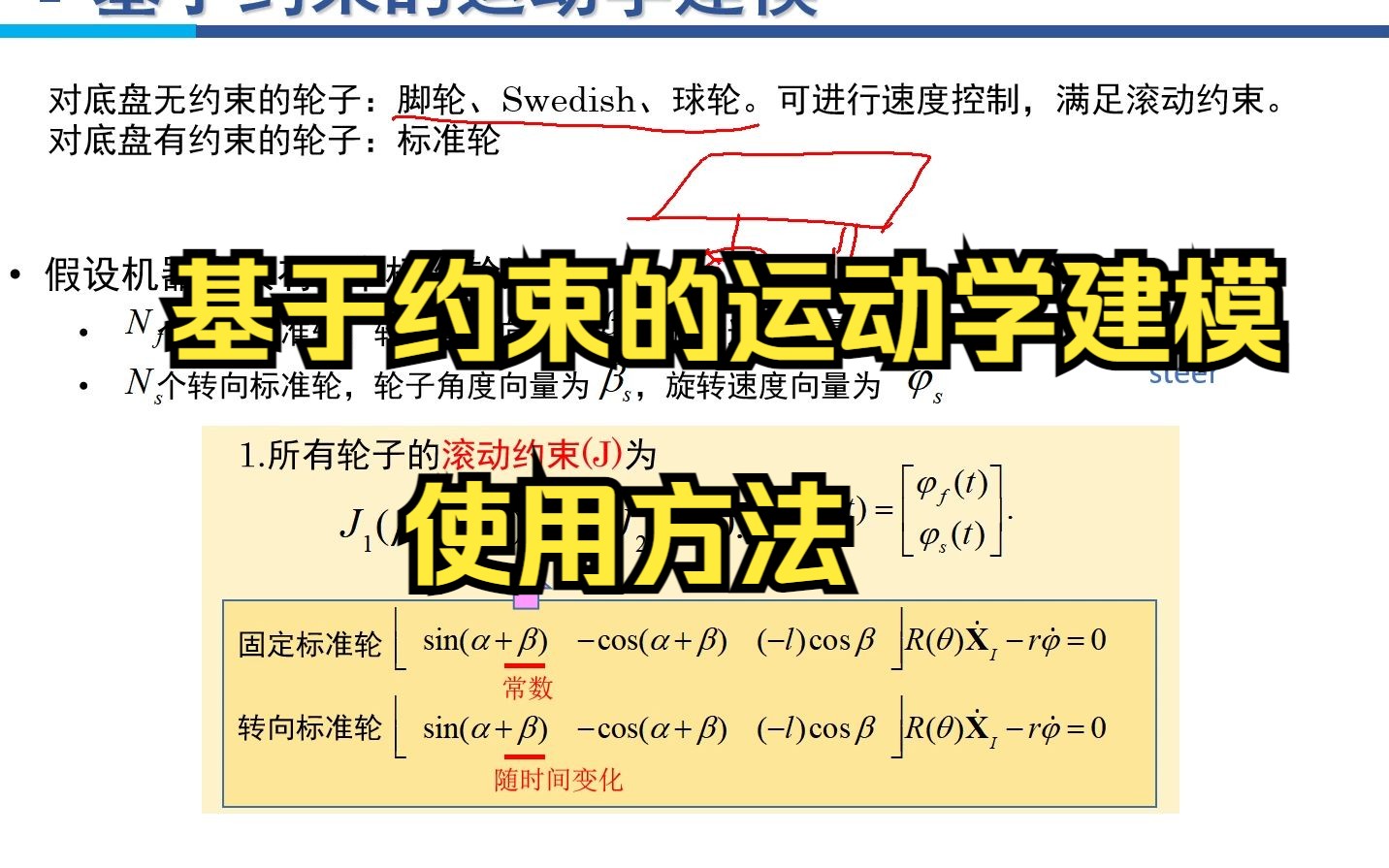
3-20自主移动机器人-基于约束的运动学建模使用方法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
3-4自主移动机器人-轮式移动机器人运动学建模主要方法及分析假设条件
2-1自主移动机器人-预备知识-序言
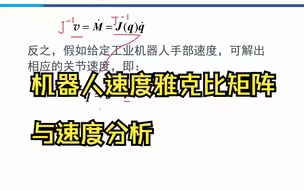
4-1机器人速度雅可比矩阵
1-2初识移动机器人
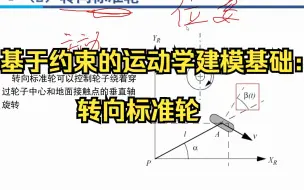
3-15自主移动机器人-基于约束的运动学建模基础:转向标准轮
3-3自主移动机器人-轮子的排布
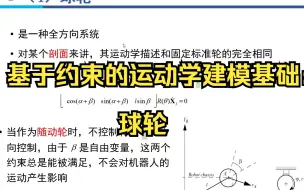
3-18自主移动机器人-基于约束的运动学建模基础:球轮
3-0机器人模型及连杆
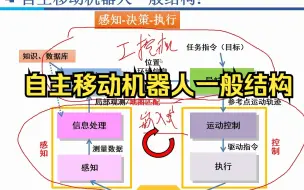
1-9自主移动机器人一般结构
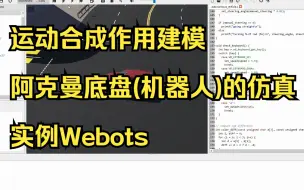
3-13自主移动机器人-运动合成作用建模-阿克曼底盘(机器人)的仿真实例Webots
4-2机器人速度雅克比矩阵与速度分析
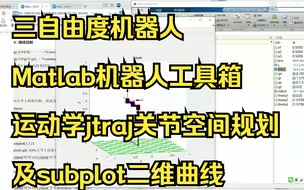
3-17三自由度机器人Matlab机器人工具箱运动学jtraj关节空间规划及subplot二维曲线
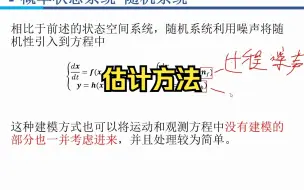
2-4自主移动机器人-预备知识-估计方法
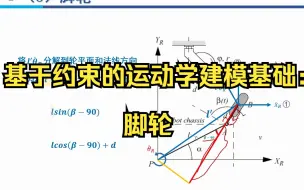
3-16自主移动机器人-基于约束的运动学建模基础:脚轮
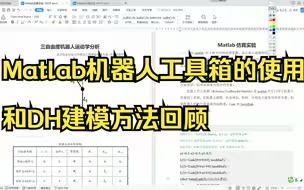
3-13Matlab机器人工具箱的使用和DH建模方法回顾
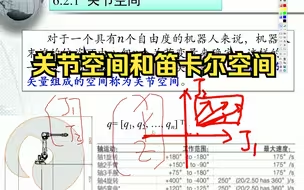
6-2关节空间和笛卡尔空间
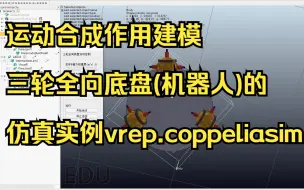
3-9自主移动机器人-运动合成作用建模-三轮全向底盘(机器人)的仿真实例vrep.coppeliasim
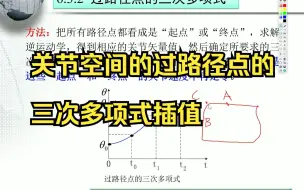
6-5关节空间的过路径点的三次多项式插值
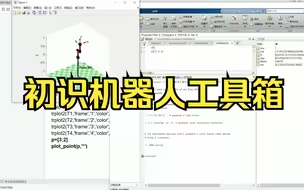
2-初识机器人工具箱
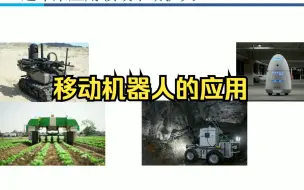
1-4移动机器人的应用
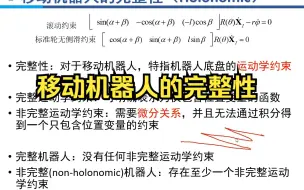
3-29移动机器人的完整性
3-16三自由度机器人Matlab机器人工具箱运动学正解robot.fkine
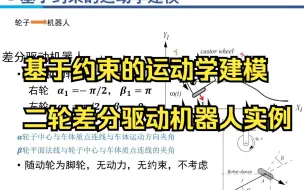
3-21自主移动机器人-基于约束的运动学建模-二轮差分驱动机器人实例
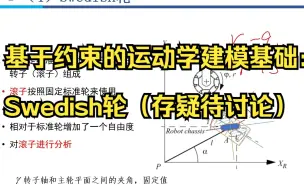
3-17自主移动机器人-基于约束的运动学建模基础:Swedish轮(存疑待讨论)
3.机器人的定义
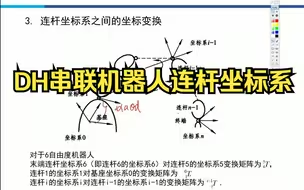
3-8DH串联机器人连杆坐标系
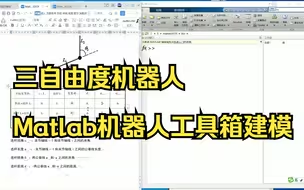
3-14三自由度机器人Matlab机器人工具箱建模
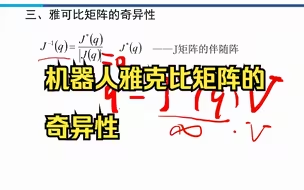
4-4机器人雅克比矩阵的奇异性
3-22六自由度机器人Matlab机器人工具箱运动学逆解robot.ikine及其他
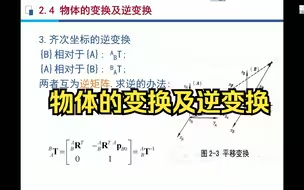
2-4物体的变换及逆变换
00 移动机器人定位与导航/移动机器人技术基础-课程简介
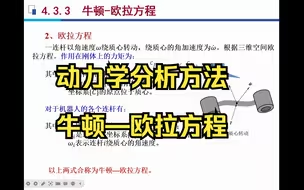
4-14动力学分析方法-牛顿—欧拉方程
3-11自主移动机器人-运动合成作用建模-麦克纳姆轮全向底盘(机器人)的仿真实例vrep.coppeliasim
6-6关节空间的高阶多项式插值
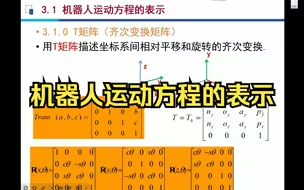
3-2机器人运动方程的表示
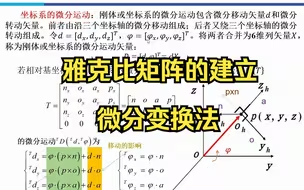
4-7雅克比矩阵的建立-微分变换法
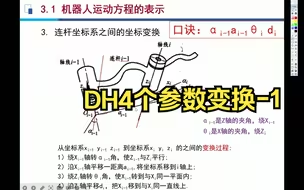
3-6DH法4个参数变换-1
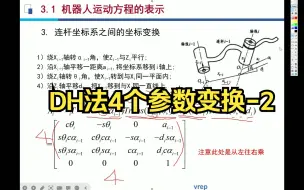
3-6DH法4个参数变换-2
2-2坐标变换
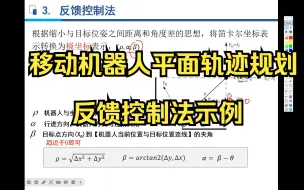
4-37移动机器人平面运动轨迹规划方法-反馈控制法示例1