V
主页
2-1自主移动机器人-预备知识-序言
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
4-4机器人雅克比矩阵的奇异性
4-10机器人的静力分析
3-1DH法的目标
4-17最优路径搜索算法-准启发式搜索算法:蚁群算法
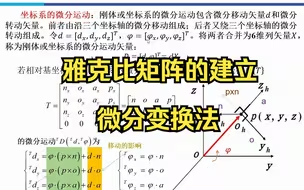
4-5机器人雅克比矩阵的建立
6-4关节空间的三次多项式插值
7-4工业机器人控制系统方案-基于运动控制卡
6-3关节空间的轨迹规划
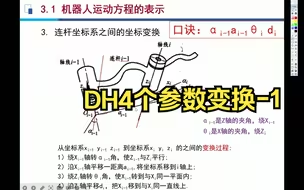
2-2坐标变换
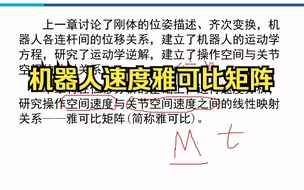
4-2机器人速度雅克比矩阵与速度分析
3-26自主移动机器人的可移动度-基于约束分析
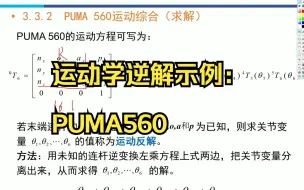
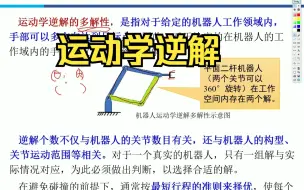
3-12运动学逆解示例:PUMA560
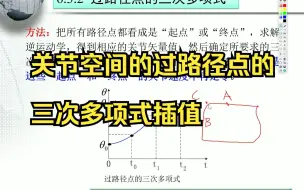
6-5关节空间的过路径点的三次多项式插值
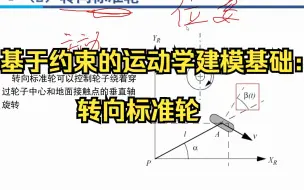
3-15自主移动机器人-基于约束的运动学建模基础:转向标准轮
3-25自主移动机器人的可移动度-基于作用分析
4-11机器人动力学简介
6-1路径描述及轨迹生成
3-6DH法4个参数变换-1
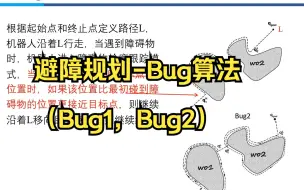
4-19避障规划-Bug算法(Bug1,Bug2)
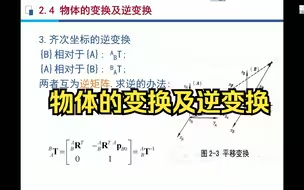
2-4物体的变换及逆变换
1-2初识移动机器人
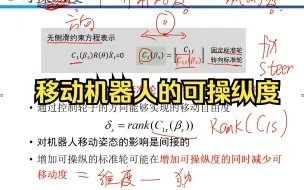
3-27移动机器人的可操纵度
4-1机器人速度雅可比矩阵
3-4DH4个参数AlphaA
3.机器人的定义
3-5DH4个参数TheataD
4-35移动机器人平面运动轨迹规划方法-参数优化法
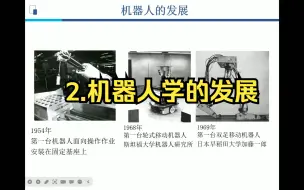
2.机器人学的发展
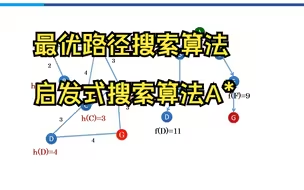
4-12最优路径搜索算法
3-11运动学逆解
3-7自主移动机器人-运动合成作用建模-四轮差动底盘(机器人)的仿真实例vrep.coppeliasim
4-7雅克比矩阵的建立-微分变换法
3-19自主移动机器人-基于约束的运动学建模基础总结
4-18避障规划
4-16最优路径搜索算法-启发式搜索算法A星
6-6关节空间的高阶多项式插值
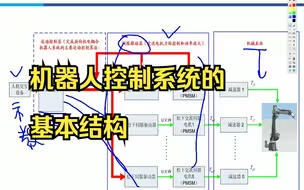
7-2机器人控制系统的基本结构
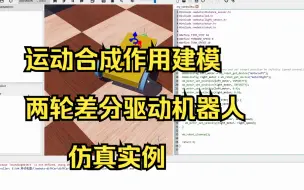
3-6自主移动机器人-运动合成作用建模-两轮差分驱动机器人的仿真实例Webots
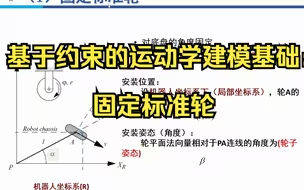
3-14自主移动机器人-基于约束的运动学建模基础:固定标准轮
3-0机器人模型及连杆