V
主页
3-4自主移动机器人-轮式移动机器人运动学建模主要方法及分析假设条件
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
3-7自主移动机器人-运动合成作用建模-四轮差动底盘(机器人)的仿真实例vrep.coppeliasim
3-2自主移动机器人-轮子的类型
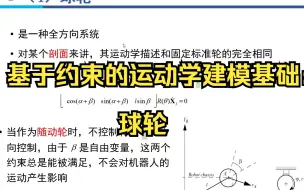
3-18自主移动机器人-基于约束的运动学建模基础:球轮
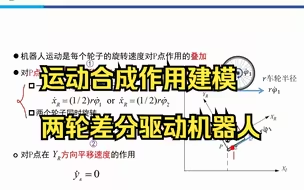
3-5自主移动机器人-运动合成作用建模-两轮差分驱动机器人
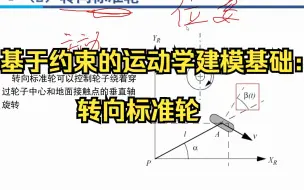
3-15自主移动机器人-基于约束的运动学建模基础:转向标准轮
3-3自主移动机器人-轮子的排布
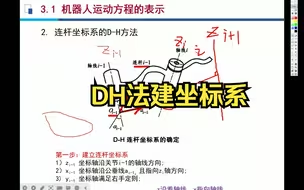
3-3DH法建坐标系
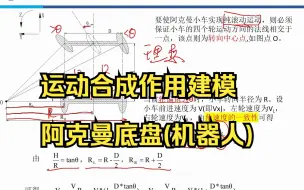
3-12自主移动机器人-运动合成作用建模-阿克曼底盘(机器人)
2-1位置和姿态的表示
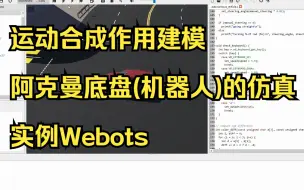
3-13自主移动机器人-运动合成作用建模-阿克曼底盘(机器人)的仿真实例Webots
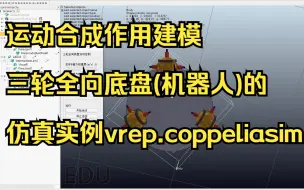
3-9自主移动机器人-运动合成作用建模-三轮全向底盘(机器人)的仿真实例vrep.coppeliasim
强化学习的数学原理:课程背后的故事+输出到海外
3-13Matlab机器人工具箱的使用和DH建模方法回顾
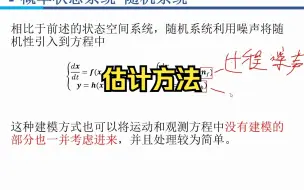
2-4自主移动机器人-预备知识-估计方法
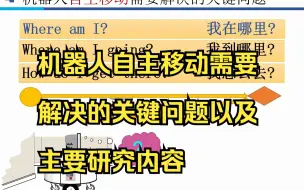
1-8机器人自主移动需要解决的关键问题以及主要研究内容
轮式机器人仿真、调试注意事项
3-8自主移动机器人-运动合成作用建模-三轮全向底盘(机器人)
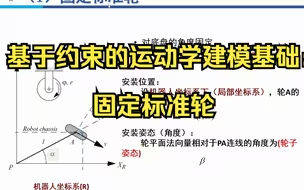
3-14自主移动机器人-基于约束的运动学建模基础:固定标准轮
实例:vrep.coppeliasim四足机器人机器狗仿真实例
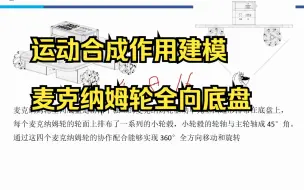
3-10自主移动机器人-运动合成作用建模-麦克纳姆轮全向底盘(机器人)
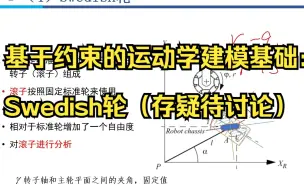
3-17自主移动机器人-基于约束的运动学建模基础:Swedish轮(存疑待讨论)
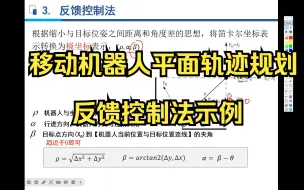
4-37移动机器人平面运动轨迹规划方法-反馈控制法示例1
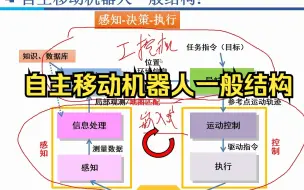
1-9自主移动机器人一般结构
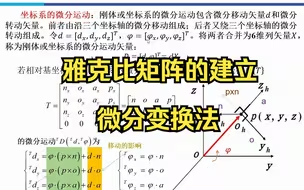
4-7雅克比矩阵的建立-微分变换法
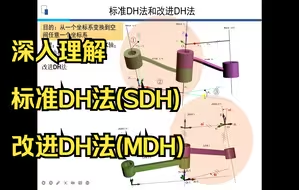
深入理解标准DH法(SDH)和改进DH法(MDH)
2-0线性代数基本概念的直观解释
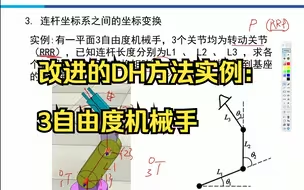
3-9改进的DH方法实例:3自由度机械手
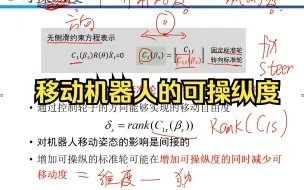
3-27移动机器人的可操纵度
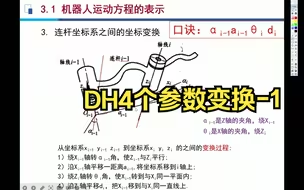
3-6DH法4个参数变换-1
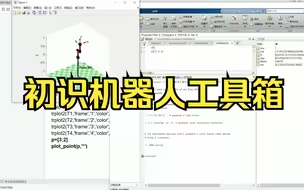
2-初识机器人工具箱
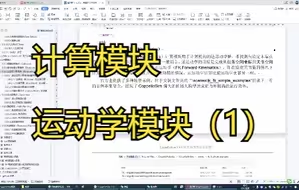
22-vrep.Coppeliasim计算模块-运动学模块(1)
3.机器人的定义
4-9雅可比矩阵的Matlab机器人工具箱仿真
3-4DH4个参数AlphaA
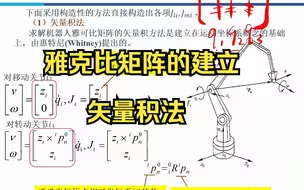
4-6雅克比矩阵的建立-矢量积法
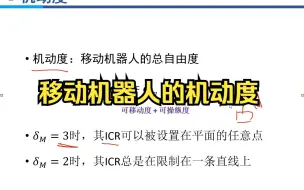
3-28移动机器人的机动度
7-3工业机器人控制系统方案-基于PLC
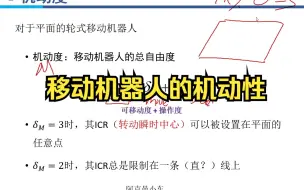
3-23自主移动机器人的机动性
7-4工业机器人控制系统方案-基于运动控制卡
8-8传感器-力传感器