V
主页
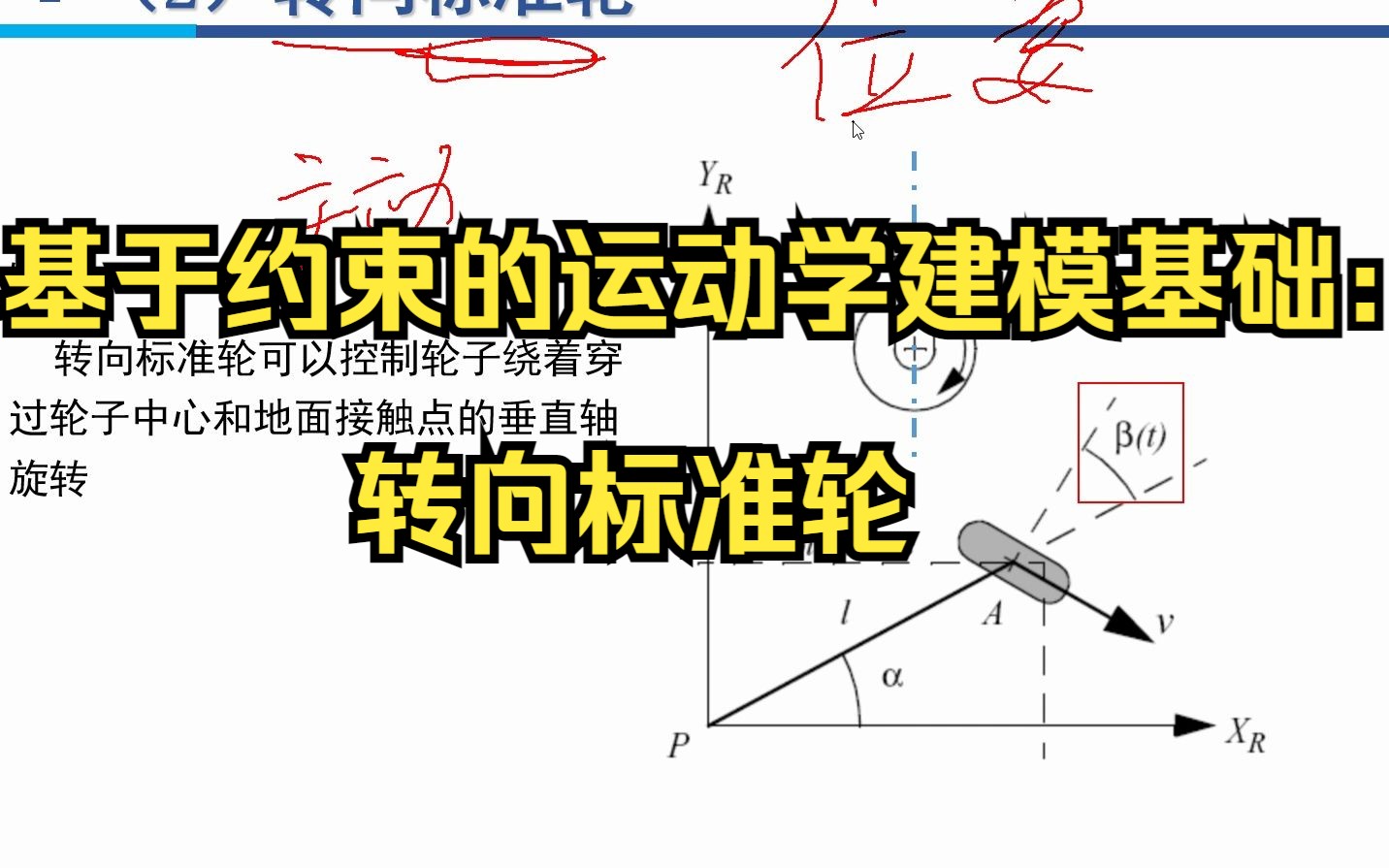
3-15自主移动机器人-基于约束的运动学建模基础:转向标准轮
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
4-4机器人雅克比矩阵的奇异性
7-4工业机器人控制系统方案-基于运动控制卡
3-11自主移动机器人-运动合成作用建模-麦克纳姆轮全向底盘(机器人)的仿真实例vrep.coppeliasim
1-2初识移动机器人
3-7运动合成作用建模-四轮差动底盘(机器人)
4-35移动机器人平面运动轨迹规划方法-参数优化法
3-1DH法的目标
3-11运动学逆解
4-11机器人动力学简介
3-12运动学逆解示例:PUMA560
4-17最优路径搜索算法-准启发式搜索算法:蚁群算法
1-7移动机器人的关键性能指标
6-3关节空间的轨迹规划
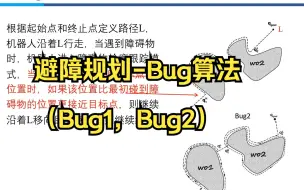
4-19避障规划-Bug算法(Bug1,Bug2)
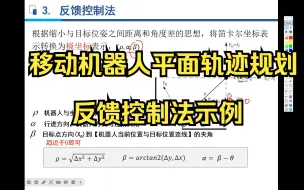
4-37移动机器人平面运动轨迹规划方法-反馈控制法示例1
4-4工作空间与位形空间
3-17三自由度机器人Matlab机器人工具箱运动学jtraj关节空间规划及subplot二维曲线
3-13Matlab机器人工具箱的使用和DH建模方法回顾
多个机器人使用相同的控制器程序
22-vrep.Coppeliasim计算模块-运动学模块(1)
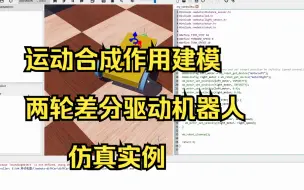
3-6自主移动机器人-运动合成作用建模-两轮差分驱动机器人的仿真实例Webots
4-18避障规划
6-4关节空间的三次多项式插值
6-1路径描述及轨迹生成
6-6关节空间的高阶多项式插值
3-33腿足式移动机器人
4-14动力学分析方法-牛顿—欧拉方程
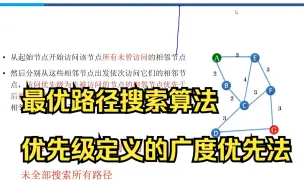
4-14最优路径搜索算法-优先级定义的广度优先法
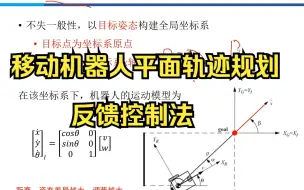
4-36移动机器人平面运动轨迹规划方法-反馈控制法
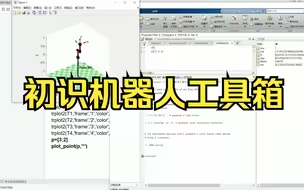
2-初识机器人工具箱
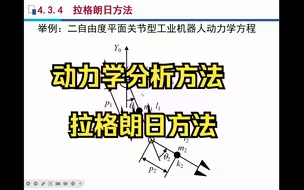
4-15动力学分析方法-拉格朗日方法
3-5DH4个参数TheataD
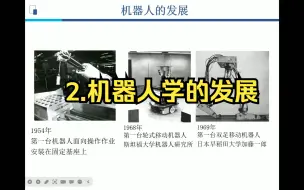
2.机器人学的发展
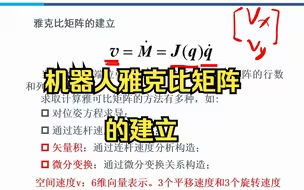
4-5机器人雅克比矩阵的建立
1-1机器人的基本功能类型
1-3移动机器人的定义
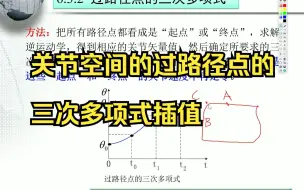
6-5关节空间的过路径点的三次多项式插值
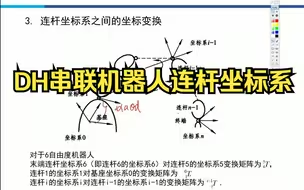
3-8DH串联机器人连杆坐标系
20-vrep.CoppeliaSim计算模块-碰撞检测模块
6-10笛卡尔空间轨迹规划和实现思路