V
主页
北大最新研究,模拟水面表面张力,效果自然、真实!
发布人
https://www.youtube.com/watch?v=3ejKNbtdfnY 该论文入选SIGGRAPH2021。因为表面张力的存在,落叶可浮于水面、水黾得以在水面爬行,这是十分自然的现象。而计算机模拟表面张力,也可以达到十分真实的效果。近日,在由北京大学陈宝权教授研究团队与北京电影学院未来影像高精尖创新中心提出的工作,作者们提出全新的模拟框架处理带表面张力的流固强耦合, 能够精确模拟各种与表面张力相关的物理过程。视频中,樱桃落在水面,你能分辨出是真实还是模拟的吗?
打开封面
下载高清视频
观看高清视频
视频下载器
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
[IROS2021] 通过触觉感知物体重心,提升机器人抓取稳定性
Kivicube AR平台:低代码可视化编辑即可完成SLAM场景制作
厦门大学:使用可穿戴 IMU和LiDAR的大规模室内外4D场景捕获
CVPR2022:GAN监督的密集视觉配准用于多种AR应用
从零搭建一套结构光3D重建系统 [理论+源码+实践]
有人用AI搞了上千万?扒遍全网,我找到了普通人用AI搞钱的十种方法
AR行业史:献给失败者的赞美诗。| Google Glass,Vision Pro,HoloLens,Orion,Magic Leap,Spectacles
NeurIPS 2021:利用神经网络从单个 RGB 图像重建全景 3D 场景
2.4倍加速!PRAM最新开源的视觉定位模型!解锁以地图为中心的学习!
最新CVPR2020论文:用AI还原3D照片(Facebook研究,效果惊艳,代码开源!)
北大工作!基于事件相机的视频帧重建和超分辨率(ICCV2021)
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
MCD-1
极快跟踪一切!DOT:无惧遮挡!
[SIGGRAPH2021]快速且通用的流体-固体相互作用3D湍流仿真模拟
[ICRA2022]谷歌机器人子公司Intrinsic最新开源机器人抓取论文
上交最新开源!仅需4张图像实现高质量3D重建!
11月23最新chatgpt国内使用教程4.0无限制免安装使用,chatgpt5快来了,写论文,如何安装订阅付费手机安卓电脑免下载GPT4o网站,100%成功!
中科院最新CityGaussian:VRAR时代的城市重建新标杆-上篇
软硬件代码均开源!多激光雷达的协同定位建图及在线外参自标定
基于事件相机的三维结构光技术ESL,性能好于Realsense技术!
这绝对是质量最高的单目深度估计开源方案!
IROS2022 ETH最新研究:走出羊的步伐
ICCV 2023|第一种稀疏的仅视觉的交叉视图定位方法!
相机标定的基本原理与经验分享
[ICCV2021]苏黎世联邦理工+微软联合工作,H20:第一人称智能交互
UE4-NeRF的神经渲染系统,专为实时渲染而设计的大型场景
[ICCV-2021] 旷视工作!GyroFlow:陀螺仪引导的无监督光流学习
CVPR2024 3D-GS再进化实时自适应视图渲染的未来!
经典3d视觉论文回顾,Facebook用『SLAM+实时光流』实现AR真实遮挡效果,发表在顶刊 ACM Transactions on Graphic 2018
CVPR'24 复旦最新3D交互大模型LL3DA来袭!
ICRA2022:自适应环境的移动机器人自主导航
CVPR'24开源 MASA万能匹配一切、跟踪一切!
光学3D测量技术原理及应用
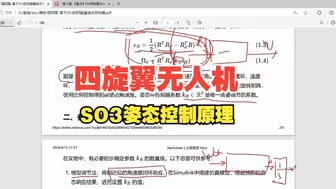
四旋翼无人机-SO3姿态控制原理
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
便携多联屏?Rokid AR Lite套装上手体验
7x24监控你的电脑,老板看了都想装的AI神器!
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇