V
主页
京东 11.11 红包
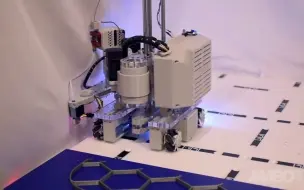
[IROS2021] 通过触觉感知物体重心,提升机器人抓取稳定性
发布人
https://www.youtube.com/watch?v=kL-Uf5pdExU 来自卡内基梅隆大学研究!当物体在远离其重心的位置被抓取时,容易抓取不稳,导致抓取失败,这项工作即处理这种失败情况!具有柔软表面的触觉传感器可以检测物体旋转时接触表面的旋转模式。该工作提出了一种基于模型的算法,该算法检测这些旋转模式,并使用 GelSight 传感器测量旋转位移。并且根据旋转检测反馈集成到闭环重抓取框架中。实验效果表明,该框架能够在早期抓取失败案例中,逐渐驱动机器人达到稳定的抓取姿势。
打开封面
下载高清视频
观看高清视频
视频下载器
IROS2021,用于自主电力线路检查的无人机系统,直接挂高压电线上自动充电!
[IROS2021] 使用镜面反射减少机器人视觉系统中的遮挡
[IROS2021] TUPPer-Map:用于 3D 语义建图的时间和统一全景感知
上海科技大学:IROS2021 | 事件相机快速动态标定
IROS2021,REAL:使用无人机对未知路况进行主动闭环的快速探索
北京航空航天大学:IROS2021基于交叉线的立体平面SLAM
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
无需 GPS:语义地图引领多机器人室内外探索
无需额外训练!SAMPro3D:零样本3D分割一切!
麻省理工:解决物体级SLAM中姿态歧义的多假设方法(IROS 2021)
GPA:凝视增强感知系统,视觉辅助无人机安全飞行(ICRA2021)
何恺明新作出炉!异构预训练Transformer颠覆本体视觉学习范式,AI性能暴涨超20%
蜡像手办机器人
CVPR'24最佳学生论文亚军!新赛道!SpiderMatch:3D形状匹配
【机器人科学III】让机器人拥有类人触觉感知,哥伦比亚大学机器人实验室最新进展
成为机器人专家的第一步:掌握这3个前提条件 🤖
南洋理工大学开源F-LOAM:最为精确和快速的开源激光SLAM方案之一
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
CVPR 2021 HPS:无需外部传感器,大场景、长时间的动作捕获系统
香港大学&南科大!基于强化学习和速度障碍法的多机器人导航
帅呆了,可拆卸、变形、协同工作的新型Swarm 3D打印机器人
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
软硬件代码均开源!多激光雷达的协同定位建图及在线外参自标定
CVPR2022:GAN监督的密集视觉配准用于多种AR应用
ICLR‘24 Spotlight 首个十亿级别3D通用大模型
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
可以说知道这五个网站就没有找不到的数据集!特别是最后一个简直就是学术利器!-人工智能/深度学习/机器学习/数据集
大一就这么水灵灵的把校赛速通了?
有灵魂的机器人,煮面机器人 网友:抖那几下就很灵魂!人工智能技术
ICRA2021,这台无人机不怕撞机!狭小环境下无人机弹性碰撞自主导航!
ICCV 2021:几行代码实现性能提升,目标检测中的旋转不变性
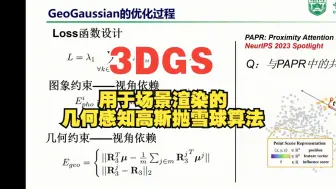
用于场景渲染的几何感知高斯抛雪球算法
一个神级代码复现网站,里面99%的论文都能找到!
10分钟入门神经网络 PyTorch 手写数字识别
香港大学&南科大!通过基于模型的学习实现直接基于点的端到端机器人导航
【B站第一】清华大佬1000分钟讲完的AI大模型(LLM)入门到实战全套学习教程!整整135集,全干货无废话!还学不会,我退出AI圈!!
四元数基础