V
主页
厦门大学:使用可穿戴 IMU和LiDAR的大规模室内外4D场景捕获
发布人
https://www.youtube.com/watch?v=IY9FikM__i8 本文提出以人为中心的 4D 场景捕捉 (HSC4D) 来准确高效地创建一个动态的数字世界,仅使用安装在车身上的 IMU 和 LiDAR。HSC4D 是无空间限制的,没有任何外部设备的限制,也没有地图,没有预先构建的地图。考虑到 IMU 可以捕捉人体姿态但长期使用总是漂移,而 LiDAR 全局定位稳定但局部位置和方向粗糙,HSC4D通过联合优化使两个传感器相互补充,取得不错结果。具体请看视频!
打开封面
下载高清视频
观看高清视频
视频下载器
CVPR 2021 HPS:无需外部传感器,大场景、长时间的动作捕获系统
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
[CVPR2022] 使用单幅彩色点投影的深度学习高光谱和深度重建
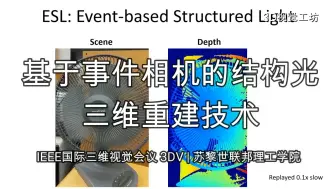
基于事件相机的三维结构光技术ESL,性能好于Realsense技术!
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
3D视觉应用-现代智慧农业
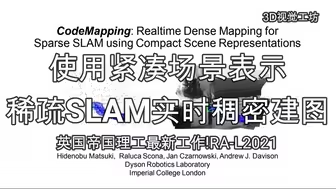
[RA-L2021] ,使用紧凑场景表示稀疏SLAM实时稠密建图!
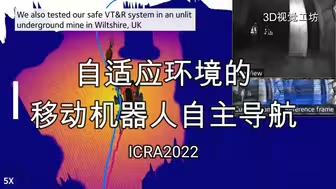
ICRA2022:自适应环境的移动机器人自主导航
自动驾驶中实战课之Lidar与IMU的同步实战
ECCV2020,循环神经网络自由合成任意视角图像,代码开源!效果惊艳!
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(中篇)
CVPR2022:GAN监督的密集视觉配准用于多种AR应用
清华大学:OcclusionFusion:遮挡感知运动估计的实时动态3D重建
上交最新开源!仅需4张图像实现高质量3D重建!
清华&华为&中科院!首个基于3D高斯分布的大场景高保真重建和实时渲染方法
3DGS涨点神器!收录顶会NIPS 2024!3DGS-Enhancer来了!
香港大学工作,FAST-LIO:基于紧密耦合迭代卡尔曼滤波的快速、鲁棒的激光雷达里程计包,代码开源
北大最新研究,模拟水面表面张力,效果自然、真实!
[CVPR2022] StyleMesh:室内 3D 场景重建的风格转移
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
[CVPR2022] 阿里巴巴: 用于单目深度估计的神经窗口全连接CRF
NeurIPS 2021:利用神经网络从单个 RGB 图像重建全景 3D 场景
06 自动驾驶中实战基础之3D-2D求解方法(PnP系列)[Camera + LiDAR + Radar + IMU]
MA-LIO:使用逐点 LiDAR 间不确定性传播的异步多LiDAR 惯性里程计
CVPR 2022 基于曼哈顿世界假设的神经网络三维场景重建
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
香港大学工作!CVPR2022:事件相机的自动对焦
[ICCV2021] ROMO:单目、单阶段、多人的3D语义分割方法
3DGS进化?2DGS颠覆3D场景重建!
[ICRA2022]谷歌机器人子公司Intrinsic最新开源机器人抓取论文
自动驾驶实战课之相机与IMU间的同步实战
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
[ICCV2021] DSEC:用于驾驶场景的双目事件相机数据集
ICRA2020论文,基于CNN和点云分割的LiDAR-SLAM点云回环检测方法
04 自动驾驶中多传感器信息融合理论(上篇)(Camera + LiDAR + Radar + IMU)(三)
3DGS进化,高效高质量的GaussianPro来袭!
大作业|激光-视觉-IMU-GPS融合SLAM算法
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
基于神经网络自由视点场景快速、高质量渲染,效果大幅领先现有算法!(代码开源)