V
主页
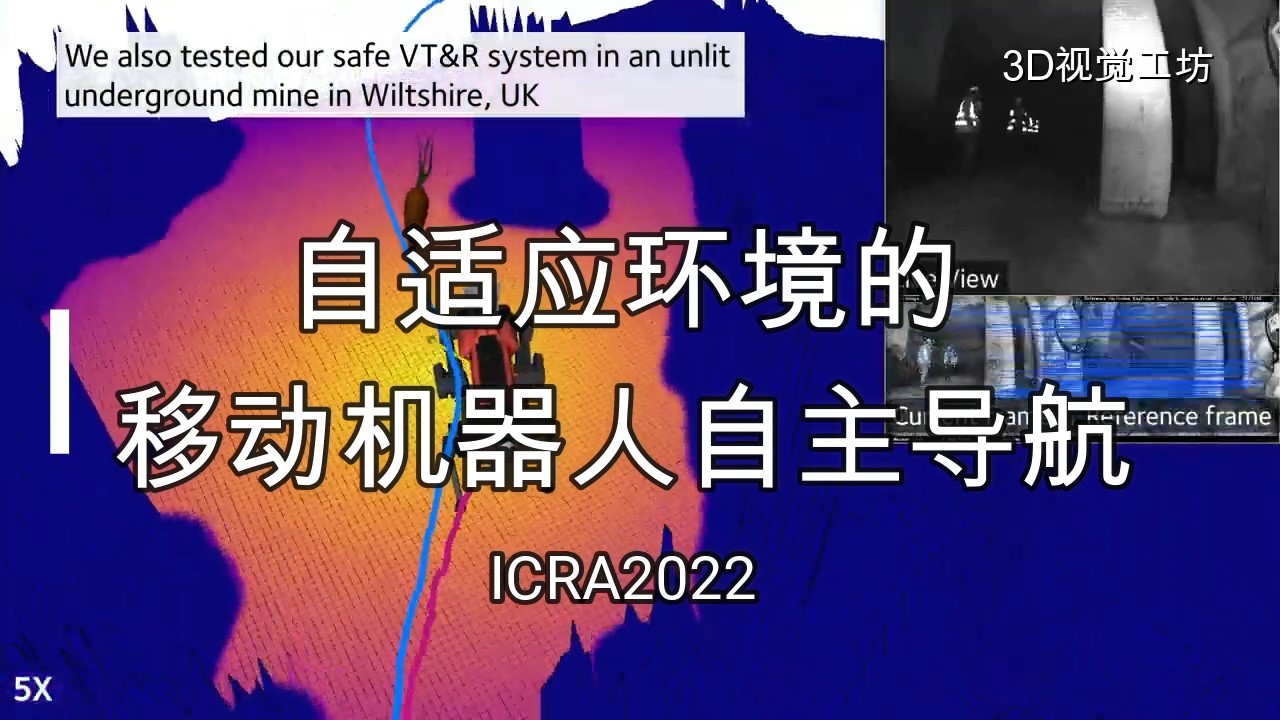
ICRA2022:自适应环境的移动机器人自主导航
发布人
https://www.youtube.com/watch?v=G_AwNec5AwU 本文提出的方法允许机器人在环境发生变化的情况下仍能安全导航。该控制器用本地高程图来计算矢量表示,并以10赫兹的频率输出用于导航的转向指令。它们结合在一个黎曼尼运动政策(RMP)控制器中,在CPU上运行需要<2ms。将该控制器与ANYmal C机器人上的VT&R系统集成,并在室内杂乱空间和大型地下矿井中进行了测试。当发生物理遮挡或视觉跟踪损失时,仍能保证机器人安全运行。具体效果请看视频!
打开封面
下载高清视频
观看高清视频
视频下载器
ICRA2021,这台无人机不怕撞机!狭小环境下无人机弹性碰撞自主导航!
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
[ICRA2022]谷歌机器人子公司Intrinsic最新开源机器人抓取论文
港大火星实验室:在大规模杂乱的3D环境中进行快速无人机探索方案
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
无人机室内自主飞行,和地面站操作
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
ICRA2020,卡内基梅隆大学机器人研究所,基于三维子图显著性的水下环境主动SLAM探测应用
[ICRA 2024] GCM
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
ORB-SLAM3基本原理与系统架构
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
【3D数学】欧拉角万向节死锁与插值
ICRA2021,基于 LiDAR 的高效、鲁棒深度学习端到端的自动驾驶导航控制,大幅减少接管次数(代码开源)
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
激光slam相对坐标精度,科力达slam车库室内操作
微型无人机群SLAM
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
无需 GPS:语义地图引领多机器人室内外探索
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
CVPR2024开源NetTrack:跟踪高动态物体!
OA-SLAM:在视觉SLAM中结合物体语义进行相机重定位[ISMAR 2022]
中科院新作!即插即用的meshing模块!精确构建无动态mesh地图,还能纠正里程计!
赛事案例|贵州大学赵梓衡团队基于LIMO开发“基于ROS的双上位机大模型语音交互目标检测SLAM导航室内智能车”项目
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
ROS机器人基于gmapping的slam自动导航建图!
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
中山大学最新提出 基于LiDAR-测距-惯性融合的机器人群体协同SLAM系统
小白如何手写g2o优化? 残差构建、雅克比推导、优化函数
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
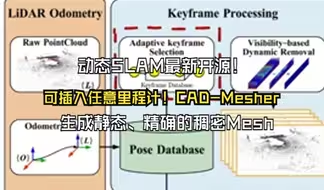
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
套件教程-FAST LIO2之点云建图
ICRA2023:用于敏捷运动的低漂移视觉惯性腿式里程计
YOLOV4用于道路交通口智能人流、车流监控
激光SLAM的原理,激光雷达有着什么样的作用
IROS 2021,使用事件相机对电力线路进行巡查,线路寿命增加十倍!代码开源!
如何处理视觉SLAM长期定位中的外观变化和轨迹漂移?
ICCV2021,浙大工作!遮挡环境下基于学习的未知空间占用分布预测,机器人运动轨迹更加光滑、安全!