V
主页
ros+openai(4)urdf快速了解
发布人
本期视频主要介绍ros的urdf,以带激光雷达的升级版小海龟三轮车为例。
打开封面
下载高清视频
观看高清视频
视频下载器
ros+openai(5)基础1
ros+openai(3-2)tensorflow1
ROS+OpenAI(7)基础3-“服务”
ROS+OpenAI(15)ROS-control
ros+openai(3)本地安装
ROS+OpenAI(13)urdf进阶-xacro
ROS+OpenAI(4-1)从零开始创建智能小车-建模
ros+openai(3-1)pycharm安装使用
ros+openai(2)虚拟机演示
ROS+OpenAI(14)gazebo物理参数
ROS多线程 与 Linux进程(1)
ROS+OpenAI(11)基础7-tf2坐标变换与四元数
C6-2智能车的建图与自主实现教程
ROS2 QA 214 How to Install TurtleBot3 packages on ROS2
铝手
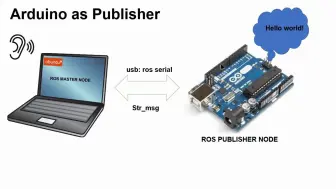
ROS - Arduino serial basics
用ROS搭建一台自平衡机器人
ROS+OPENAI(17)pdb调试工具
如何快速低成本开展机器人项目
Deploying ROS Node on Raspberry Pi
自制ros建图导航机器人2
调车总不能炸机了吧(●'◡'●)
理解 【惯量】
【开源无人机】Vins_fusion代码讲解
Dynamixel Servos ROS 机械臂
7款 变形机器人
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
控制系统设计之动力系统建模2/6
python-随机数与动态图绘制
【开源无人机】从零调试一架开源无人机
反作用轮与力矩陀螺的区别。。
1/12 雅马哈 YZF-R1M
套件教程-RTABMap之3D雷达定位与导航
强化学习 四足
ROS Arduino tutorials _ ROS Arduino serial communication example - Part 2
FOC与直流无刷电机
ORB-SLAM2究竟是什么
【汽车】软件定义汽车:基于Simulink开发面向服务的应用
双陀螺自平衡自行车
IROS 2020 机器人姿态控制