V
主页
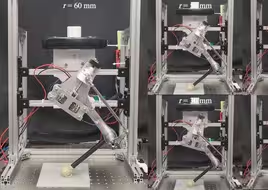
1KHz逆向数值求解(带约束)测试
发布人
双足机器人,单腿5自由度,1KHz运行逆向数值求解,脚掌与地面保持平行。
打开封面
下载高清视频
观看高清视频
视频下载器
双足机器人站立稳定(初步调试)
类似cassie双足行走demo测试(未完善)
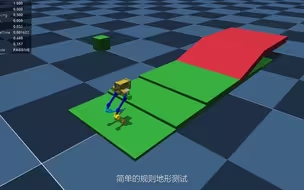
全向移动和规则地形测试
近乎Cassie的双足机器人运动控制-自研
行走测试
Walking just like Spot!
板簧估计末端矢量力-可视化
MIT-humanoid Simple Walk Demo
双足机器人运动控制,步行和跑步之间的无缝过渡[搬]
双足机器人调试记录
双足高程图和3D几何渲染
人形机器人脚踝踝关节Ankle结构新方案
[24 RA-L] 摆动速度超快!一种适合足式机器人快速摆动的腿部结构, 很巧妙!
人形机器人大踏步奔跑
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
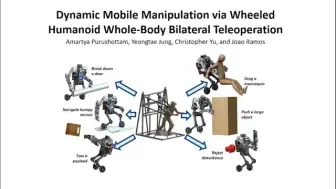
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
人形机器人 手指机械结构
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
通过对抗运动先验学习四足机器人的双足行走
方块小机器人
上海WAIC2024世界人工智能大会亮点
AIRA 挑战赛:用于工业检测的遥控移动操作
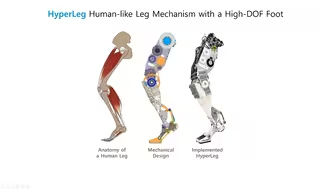
高度动态运动的类人机器人腿和脚
WAIC开幕,达闼人形机器人领衔“十八金刚”先锋阵列震撼亮相
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习
最近我又用3D打印做了哪些好玩的
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
【何同学】不用脚,你能把球踢多远?
耗时半年,我做了一个可以流畅运行YOLOV5的小相机
呐, 这就叫优雅~