V
主页
[24 RA-L] 摆动速度超快!一种适合足式机器人快速摆动的腿部结构, 很巧妙!
发布人
https://www.youtube.com/watch?v=Qudi73Vm4_c Continuously Variable Transmission and Stiffness Actuator Based on Actively Variable Four-Bar Linkage for Highly Dynamic Robot Systems Abstract: This paper presents a novel actuation mechanism that combines a continuously variable transmission (CVT) mechanism with a variable stiffness actuator (VSA) for highly dynamic robot systems such as legged robots. The CVT effectively changes the input-output transmission ratio of the system, thereby extending the operational torque-speed range. Concurrently, the VSA adjusts the system stiffness, altering its compliance characteristics. Both CVT and VSA are seamlessly integrated into a single four-bar linkage mechanism, with their active features enabled by an actively variable link within this linkage. This CVT-VSA mechanism offers a range of dynamic advantages by inversely varying transmission ratio and stiffness, which includes impact mitigation, torque or speed amplification, and expanded control bandwidth. The implementation and efficacy of the CVT-VSA mechanism in a legged robot were tested and validated through a series of experiments. https://ieeexplore.ieee.org/document/10569041
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人 手指机械结构
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
炽天使结构详解 包含全部构件 和快速安装 更换模式#nerf软弹发射器 #3D打印发射器
Go2开发教学05-底层服务接口
AI 眼中的体操项目
【结构】想不磕都难
【手把手教做轮足机器人】1_概论和机械结构
电梯基础知识(二)基本结构续
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
经过了多年的交易实战,这是我唯一会使用的均线交易策略(进阶阶段的交易内容)
真牛!这个人形机器人吊打很多厂家的“产品”
那些被切成两半的物件,一起看看内部结构吧!
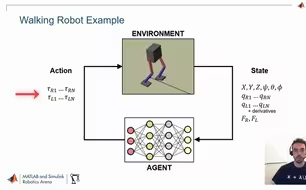
双足机器人的深度强化学习- MATLAB and Simulink
起飞!国产 机器狗 最快8m/s 打破四足电驱世界记录 | 镜识科技“黑豹I” #机器狗性能
一有什么就会看对方的【结构】
人形机器人足底机械结构设计
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
双足机器人步态生成 MATLAB and Simulink
有开源github代码! RA-L论文 人形机器人的多接触全身控制
幽灵机器人 Ghost Robotics - Vision 60
通过优化理论指导设计双足以达到控制和任务的最优
【论文复现】移动机械臂协同控制(六)——UR5e_Tracer轨迹跟踪
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
Highly dynamic gaits controlled by a whole-body MPC
人类对结构的开发程度不足15%
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
【论文复现】移动机械臂协同控制(三)——UR5e实物控制
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
写了一个人形机器人仿真,适用5或者6自由度的腿形
结构设计专栏:如何控制同轴关系?
【李宏毅】2024年公认最好的【LLM大模型】教程!大模型入门到进阶,一套全解决!2024生成式人工智慧-附带课件代码
【论文复现】移动机械臂协同控制(四)——UR5e_Tracer_Robot协同控制
六足机器人重大更新,手把手教你制作
基于分层优化的四足机器人全身运动控制搬运重物
Panoptic-SLAM:使用全景分割的动态环境中的视觉 SLAM 代码已开源