V
主页
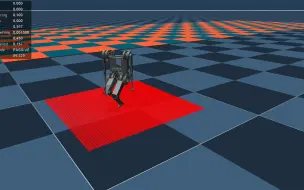
Walking just like Spot!
发布人
Swing leg period: 0.5s. The last paragraph is directly controlled by the xbox handle, simulating commands and disturbances (hands are shaking). Multiple closed-loop controllers(Sequential composition),WBC(Multiple QPs),Command-level precision footing,CoG identification and dynamic adjustment.
打开封面
下载高清视频
观看高清视频
视频下载器
【2024 ROBOCON】仿生四足竞速-唯一一只倒着走的狗狗
类似cassie双足行走demo测试(未完善)
MIT-humanoid Simple Walk Demo
近乎Cassie的双足机器人运动控制-自研
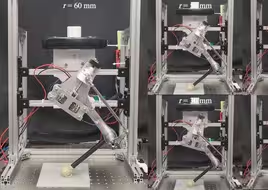
[24 RA-L] 摆动速度超快!一种适合足式机器人快速摆动的腿部结构, 很巧妙!
1KHz逆向数值求解(带约束)测试
复杂地形步态切换仿真
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
双足机器人站立稳定(初步调试)
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
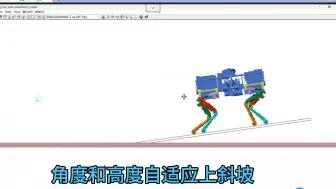
四足机器人MPC爬坡
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
DeeperMimic:(基于实时动画的)四足机器人多技能控制
行走测试
双足机器人调试记录
BD Altas 感知功能 你能从中看到哪些可以学习的技术点?
通过对抗运动先验学习四足机器人的双足行走
我是山里灵活的狗!!!
宇树狗儿 动作舞蹈
板簧估计末端矢量力-可视化
呐, 这就叫优雅~
全向移动和规则地形测试
【2024ROBOCON】仿生足式挑战赛国二——比赛回顾(后附彩蛋)
双足高程图和3D几何渲染
Go2使用教学15-3D 激光建图
六足机器人重大更新,手把手教你制作
19年做的四足机器人,准备再把机器视觉和gpt加进去
这是一条寻求RL+robots合作的视频!
复刻中的esp32迷你四足机器人
我不当狗了!JOJO!
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
仿生机器人:我们离真正的人工生命还有多远?
Go2开发教学07-实验示例一,遥控器切换运控
意大利捡烟头的机器狗VERO | 要捡光地球上的4万亿颗烟头 | 机器人 | 四足机器人 | 机器狗 | 智能机器人 | 人工智能机
【机器狗】ubuntu 2204系统,野火电子鲁班猫4-RK3588S主机,HOTRC单手遥控器。MIT开源四足机器人复现,遥控控制仿真狗子移动。
宇树狗儿 倒立?
智慧电网:机器狗电网巡检应用场景
杭州云深处科技AI Robot Dog Chat | LLM VLM VLA
配备吸尘器的四足机器人,可高效清除垃圾。
燃气热水器?算法牛哇!控制狂喜!!!