V
主页
鱼眼相机标定基础(上篇)
发布人
本视频来自「3D视觉工坊」精品课程: 相机模型与标定系统课程(单目+双目+鱼眼+深度相机):https://ebzbf.xet.tech/s/3E00RW 小助理微信: cv3d007
打开封面
下载高清视频
观看高清视频
视频下载器
相机标定的基本原理与经验分享
绪论|单目相机标定理论及张正友标定法(上篇)
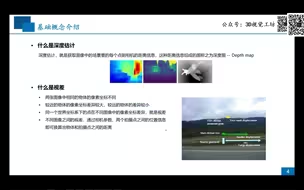
深度相机概述
双目相机标定基础及标定实战
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
Open3D与点云处理简介(公开课)
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
光学3D测量技术原理及应用
从零搭建一套结构光3D重建系统 [理论+源码+实践]
视觉快速定位与实时稠密简图简介
高速结构光三维面形测量方法
RA-L 2020:无需专门标定板或视图对齐的相机-激光雷达的校准方法
点云3D深度学习模型与实践
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
无人机|PID算法详解与实战(上)
单目深度估计绪论
PID控制器原理讲解
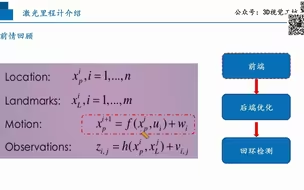
激光里程计精讲(上)
四旋翼模型与控制基础
ORB-SLAM3基本原理与系统架构
无人机|几何约束下多旋翼无人机的全状态在线轨迹规划
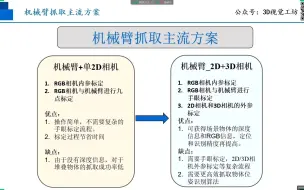
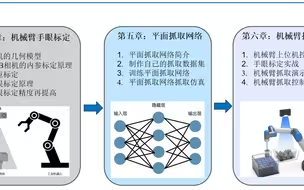
机械臂抓取简介
无人机-PID算法详解与实战
上海科技大学:IROS2021 | 事件相机快速动态标定
四旋翼无人机-PX4控制算法原理
BEV与Occupancy入门参考资料必看
Occupancy的工程细节
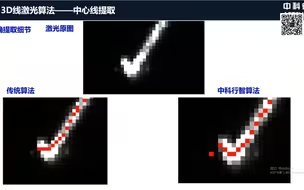
3D线激光相机检测技术解析与应用分享
机械臂抓取-开发环境搭建
三维点云系列视频——第一章绪论
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
基于单张图片的3D人脸重建概述
CVPR'24 Oral Waymo新SOTA!纯稀疏检测器SAFDNet的前世今生!-上篇
CVPR2021,基于多视点鱼眼图像的实时球面扫描立体成像
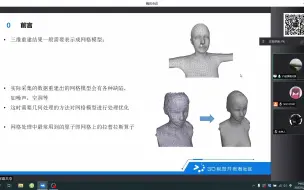
三维重建中的网格处理算法分享(公开课)
自动驾驶实战课之多相机间的同步实战
四旋翼模型简介-御风250模型
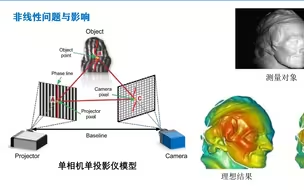
结构光的非线性问题与校正