V
主页
绪论|单目相机标定理论及张正友标定法(上篇)
发布人
本视频来自「3D视觉工坊」精品课程:相机模型与标定系统课程(单目+双目+鱼眼+深度相机):https://ebzbf.xet.tech/s/3E00RW 小助理微信: cv3d007
打开封面
下载高清视频
观看高清视频
视频下载器
相机标定的基本原理与经验分享
双目相机标定基础及标定实战
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
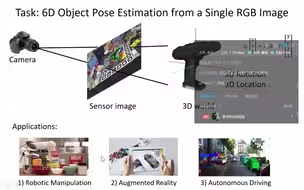
基于几何信息指导的单目6D物体姿态直接回归算法
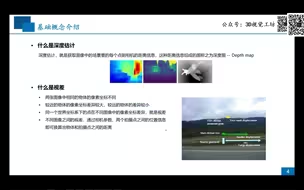
深度相机概述
从零搭建一套结构光3D重建系统 [理论+源码+实践]
Open3D与点云处理简介(公开课)
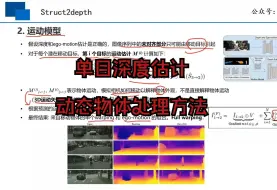
单目深度估计绪论
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
三维点云系列视频——第一章绪论
这绝对是质量最高的单目深度估计开源方案!
光学3D测量技术原理及应用
如何高效学习单目深度估计?
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
RA-L 2020:无需专门标定板或视图对齐的相机-激光雷达的校准方法
Depth Anything!最强开源单目深度估计SOTA!
单目深度估计|连续帧方法实战课
上海科技大学:IROS2021 | 事件相机快速动态标定
绪论(LOAM系列与LIO-SAM简介)
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
BMVC'24开源 | BaseBoostDepth:更强大的自监督单目深度估计
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
无人机|PID算法详解与实战(上)
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
国内首个面向具身智能方向的理论与实战系统课程
软硬件代码均开源!多激光雷达的协同定位建图及在线外参自标定
单目无监督深度估计综述
苏黎世联邦理工:利用事件相机进行单目稠密深度估计
CVPR满分论文!即插即用的6D物体姿态估计大模型(BOP排行榜第一)
单目深度估|动态物体处理方法
[非完整版]基于结构光投影三维重建技术系列课程-绪论
CVPR2021最新论文,基于内关联性的单目实时全身动作捕获,速率达到25帧/秒
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
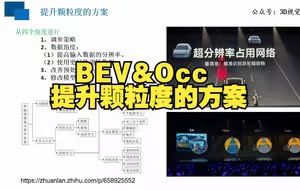
BEV&Occ提升颗粒度的方案
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
CVPR2024开源NetTrack:跟踪高动态物体!
NeurlPS 2023 扩散模型对光流和单目深度估计的惊人有效性!
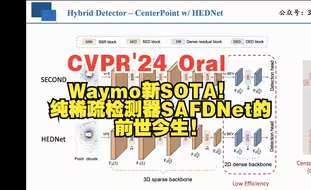
CVPR'24 Oral Waymo新SOTA!纯稀疏检测器SAFDNet的前世今生!-上篇
高速结构光三维面形测量方法
自动驾驶实战课之多相机间的同步实战