V
主页
双目相机立体匹配基础(上篇)
发布人
本视频来自「3D视觉工坊」精品课程:相机模型与标定系统课程(单目+双目+鱼眼+深度相机):https://ebzbf.xet.tech/s/3E00RW 小助理微信: cv3d007
打开封面
下载高清视频
观看高清视频
视频下载器
深度相机概述
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
相机标定的基本原理与经验分享
大模型时代下的端到端自动驾驶(上篇)
LightGlue:最强轻量级特征匹配?
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
UCL开源 | Spann3R:基于空间记忆,不估计相机参数也能实时重建(上篇)
CVPR'24 开源|特征匹配新范式:从语义区域到点的匹配框架
四元数基础
光学3D测量技术原理及应用
最新CVPR2020论文:SuperGlue(超级胶水):用图神经网络来做图像匹配,超越现有所有匹配算法
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
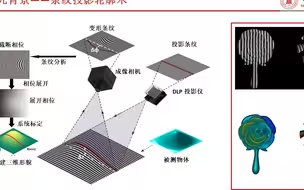
从零搭建一套结构光3D重建系统 [理论+源码+实践]
CVPR'24最佳学生论文亚军!新赛道!SpiderMatch:3D形状匹配
CVPR23开源 超越LoFTR!大尺度变化下的特征匹配!
CVPR'24开源 MASA万能匹配一切、跟踪一切!
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(上篇)
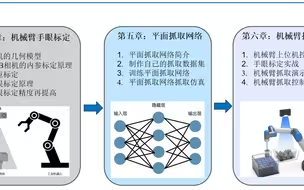
机械臂抓取-开发环境搭建
学习教程:点云匹配-正态分布变换NDT(Normal Distributions Transform)算法
上海科技大学:IROS2021 | 事件相机快速动态标定
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
香港科技大学!CVPR&NeurIPS2024开源 | 迈向通用可泛化的自动驾驶世界模型(上篇)
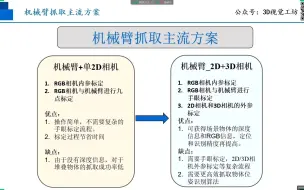
机械臂抓取简介
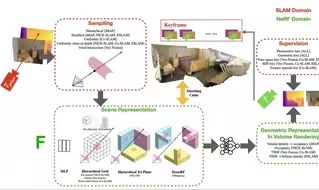
CVPR2024开源NeRF-SLAM新SOTA:请任意选择你的高效神经表征和渲染方程?
四旋翼模型与控制基础
中科院最新CityGaussian:VRAR时代的城市重建新标杆-上篇
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
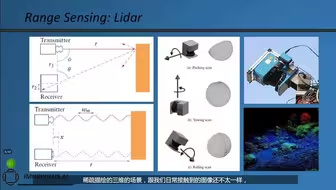
什么?不做时间同步也可以实现LiDAR-相机三维重建?
DoGaussian:分布式训练3DGS,速度提升6倍以上,高质量渲染-上篇
3.9k star!2张图片重建稠密3D场景!竟然还不需要相机内参!
四旋翼无人机-PX4控制算法原理
CVPR满分论文!即插即用的6D物体姿态估计大模型(BOP排行榜第一)
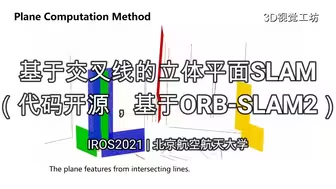
北京航空航天大学:IROS2021基于交叉线的立体平面SLAM
苏黎世联邦理工:利用事件相机进行单目稠密深度估计
【3D视觉工坊】第十三公开课:基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量
ICRA'24 | 12,000倍加速!极速避障!NURBS助力无人机在动态环境中精准导航!
港科大最新 开放词汇3D物体检测新SOTA-CoDAv2p-下篇
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
自动驾驶中常用传感器硬件介绍