V
主页
【3D视觉工坊-非完整版】基于Python的单目相机标定理论+实践
发布人
主题:基于Python的单目相机标定理论+实践 主讲嘉宾: 曹博 课程大纲: 1、标定意义 2、成像模型 3、四大坐标系 4、畸变校正 5、代码实践
打开封面
下载高清视频
观看高清视频
视频下载器
相机标定的基本原理与经验分享
绪论|单目相机标定理论及张正友标定法(上篇)
这绝对是质量最高的单目深度估计开源方案!
北交博士主讲:深度学习驱动下的相机标定技术发展(上篇)
Depth Anything!最强开源单目深度估计SOTA!
深度相机概述
上海科技大学:IROS2021 | 事件相机快速动态标定
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
苏黎世联邦理工:利用事件相机进行单目稠密深度估计
五分钟开发一款自己的点云处理软件(python)
软硬件代码均开源!多激光雷达的协同定位建图及在线外参自标定
NeurlPS 2023 扩散模型对光流和单目深度估计的惊人有效性!
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
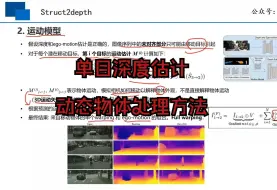
单目深度估|动态物体处理方法
单目无监督深度估计综述
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
3.9k star!2张图片重建稠密3D场景!竟然还不需要相机内参!
极快跟踪一切!DOT:无惧遮挡!
香港大学&南科大!通过基于模型的学习实现直接基于点的端到端机器人导航
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
如何高效学习单目深度估计?
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
清华最新开源万能3D分割一切!
[ICCV 2021] 基于水体流动的可微框架进行水下单目3D重建
CVPR2024开源NetTrack:跟踪高动态物体!
四元数基础
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
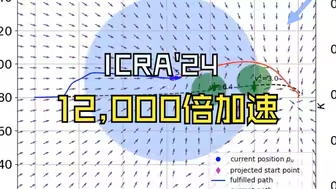
ICRA'24 | 12,000倍加速!极速避障!NURBS助力无人机在动态环境中精准导航!
GS-SLAM:具有3D高斯溅射的稠密视觉SLAM
自动驾驶中的视觉感知技术
3DGS进化?2DGS颠覆3D场景重建!
光学3D测量技术原理及应用
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
四旋翼无人机-PX4控制算法原理
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!