V
主页
自动驾驶规划控制概况
发布人
自动驾驶规划控制模块负责输出油门/刹车、方向盘的组合操作,直接决定着自动驾驶的安全性及舒适度。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶规划算法岗高频面试题详解
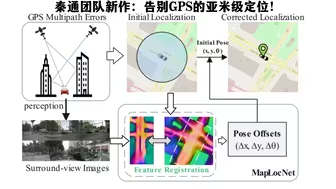
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
端到端自动驾驶:SparseDrive 算法详解
LIO系统的改进及其在自动驾驶定位模块中的应用 | 高翔
视觉SLAMVIO开源代码解析-DSO
视觉导航:从状态估计到运动规划
互联网人,如何“变道”自动驾驶?
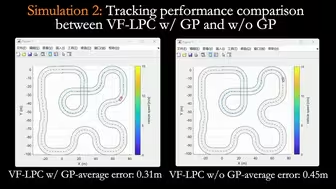
向量场引导的无人车学习预测运动规划算法
4位大佬浅谈自动驾驶行业的未来及发展
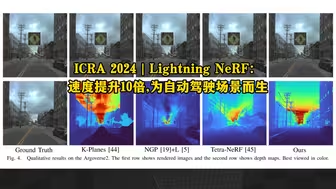
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
自动驾驶公司招聘最看重什么?
移动机器人运动规划方法分类
Waymo研发经理|自动驾驶感知前沿技术介绍
高翔SLAM报告:开阔高动态区域的激光融合定位
无人机集群的去中心化和分布式状态估计和协同定位与建图-徐浩/香港科技大学博士
NVIDIA 自动驾驶实验室|利用生成式 AI 增强自动驾驶仿真
为应对不确定性问题,提出的框架VADv2:通过概率规划实现端到端矢量化自动驾驶
第六期《智能无人车:从硬件到技术实战》训练营精彩回顾
当机器人遇到遮挡:IROS'24最新佳作揭秘「如何在视觉盲区保持精准人体追踪
Pyramid Diffusion:精细生成3D大场景,自动驾驶高质量数据来了
BEVFormer一作分享,基于时空融合的BEV感知”
面向移动机器人的道路环境感知-范睿/同济大学教授
AR/VR 行业探讨以及SLAM从业职业规划 | 圆桌论坛
全球首个开源自动驾驶场景3DGS工作—S Gaussian:用于自动驾驶的自监督街道高斯,无需标注,就可实现逼真的街景重建
StreamPETR—作分享:稀疏向量化表征长时序建模
中国科大新作 | 基于3D高斯的多模态融合在无界场景中的定位和重建
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
2D Fast-Planner+MPC跟踪+Perception Aware
深蓝学院&元戎启行:听大佬聊自动驾驶
自动驾驶入门必看,全网最全学习路线及资料,一份文档打包带走!
清华叉院、理想提出DriveVLM,视觉大语言模型与自动驾驶融合,以提升自动驾驶能力
讲座 | 利用技能学习的扩散策略实现层次化机器人轨迹生成——香港大学在读博士生梁志烜
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
港科大最新工作:无人机快速飞行中智能鲁棒感知和轨迹规划策略
第一个利用GPT-4V在现实场景中进行开放式推理和自适应规划的闭环框架: COME-robot
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
自动驾驶企业招聘注重那些能力?忌讳什么?工程能力和算法哪个更重要?
上海交大邹丹平团队的最新开源力作,Ground-Fusion:一种对极端情况具有鲁棒性的低成本地面 SLAM 系统。
多伦多大学等发布!面向LiDAR点云的无监督目标检测
多模态信息感知的SLAM | 吴毅红