V
主页
自动驾驶企业招聘注重那些能力?忌讳什么?工程能力和算法哪个更重要?
发布人
本次直播活动,深蓝学院特邀夏添(白犀牛无人车联合创始人兼CTO),刘兰个川(小鹏汽车算法研发总监,自动驾驶北京平台负责人),黎嘉信(高仙机器人深度学习总监、新加坡研发中心总监),任乾(自动驾驶定位算法专家)四位嘉宾分享企业招聘经验,同时对垂直领域的行业发展、技术学习及应用落地,多层次、全方位的为求职者解读剖析。 ------------------ 感兴趣的同学可以点击下方链接添加工作人员,获取人工智能海量资料,还有高质量行业交流群哦~ https://www.shenlanxueyuan.com/launch/B0184/detail
打开封面
下载高清视频
观看高清视频
视频下载器
4位大佬浅谈自动驾驶行业的未来及发展
多传感器融合感知
六维物体位姿估计与追踪:从实例级到类别级
自动驾驶规划算法岗高频面试题详解
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L1 Apollo架构
自动驾驶规划控制概况
Waymo研发经理|自动驾驶感知前沿技术介绍
算法原理与代码实践融合讲解的NeRF精品课程之基础篇:体渲染
【免费公开课】用于无监督双目立体匹配学习的视差注意力机制
坚 持b站抄 书,28 天共 6.5w,方法简 单人人 可做!分享我的经 验和方 法!!
B站居然没人讲?移动机器人和量产自动驾驶的区别与联系
目标检测/物体检测 常用数据集
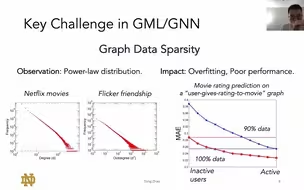
图机器学习中的数据增强技术
AR与计算机视觉技术 | 吴克艰
B站强推!自动驾驶中的多模态3D目标检测实战教程,计算机博士从零解读特征表示/对齐/融合,轻松搞定论文创新点(人工智能/深度学习/计算机视觉)
端到端基础!从原始传感器数据到控制策略
【面经分享】如何成为offer收割机?——移动机器人专场
通过五件事直击AI行业热度!教育职场齐发力势不可挡, 学习AI已然成为新常态!
图森未来在重卡自动驾驶的最新落地与实践 | 王乃岩
个人英语学习经验简单分享
端-云协同的视觉定位与重建及应用 | 章国锋
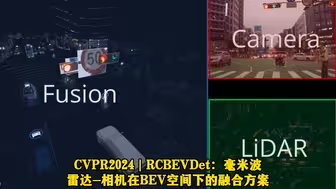
CVPR2024 | RCBEVDet:毫米波雷达-相机在BEV空间下的融合方案
理想汽车周榜9月2周:年末冲刺开启,再谈理想智驾风波!
端到端智能驾驶系统的优势与实现方式,以及端到端智能驾驶系统是自动驾驶的未来吗?
互联网人,如何“变道”自动驾驶?
第三届全国SLAM技术论坛 | 开幕致辞
自动驾驶主流感知范式:BEV
ECCV'24 | JHU提出无需SfM的X光3DGS技术: X-Gaussian,使得X射线新视图合成推理速度提升73倍!
给享界S9 ADS3.0上强度,离无人驾驶还差多少?
SLAM在机器人与自动驾驶领域的从业探讨 | 圆桌论坛
"你有没有发现:只要你一整天都很认真的学,少用手机,完成该完成的任务,运动半小时出点汗,内心就会感到平静和快乐,也不会再胡思乱想,患得患失,焦虑不已了"
20万内它的智驾车技最好?
高翔SLAM报告:开阔高动态区域的激光融合定位
2021 高翔:视觉SLAM基础
【干货】研究生能从导师身上学到什么?听听我的视角。
一窥大神们与中国智驾的这些年,入局智能驾驶汽车领域的12大企业的技术灵魂人物#端到端#人工智能#自动驾驶#智能驾驶#BEV感知#车载
【字幕版】R-CNN及Fast RCNN目标检测算法
看完特斯拉AI团队公布的最新自动驾驶发展蓝图,真的太震撼了!必须跟大家分享一下
BEVFormer一作分享,基于时空融合的BEV感知”
开着自动驾驶汽车的你能想到有多少种感知技术在为你保驾护航吗?