V
主页
京东 11.11 红包
MuJoCo 苍蝇仿真
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
MuJoCo 人形机器人&四足机器人仿真一览
强化学习四足机器人一
强化学习四足机器人二
基于安全区域强化学习的狭窄空间阿克曼机器人自探索
宇树B2-W轮足载人
机器人仿真软件 MuJoCo replicate 元素
斯坦福大学开源 - 机器人技能学习 通用操作接口 UMI (Universal Manipulation Interface) Demo
ETH + NVIDIA 研究 —— Orbit: 交互式机器人学习环境的统一仿真框架
灵巧手钢琴演奏 RoboPianist
机器人逆运动学示例
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
人形机器人 Nadia 的新手臂
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
实时最优控制讲座 —— 最优控制机器人软件
强化学习,启动!
NVIDIA 软硬件开发的人形机器人(From AVs to Humanoids)
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym!
xQc看2028年马斯克机器人阻止投票给民主党
最新 ROS 2: Jazzy Jalisco 发布,支持 Ubuntu 24.04
ETHZ 四足机器人研究 —— 学习具有风险意识的运动(ICRA 2024)
用于野火的自主无人机和人工智能 : CMU 机器人研究所
德国宇航中心(DLR)人形机器人 neoDavid
佐治亚理工学院研究 —— 人体动捕训练四足机器人(类人动作,如打网球)
废墟中逃生的四足狗
基于MADDPG的多无人机目标合围
UCS 机器人研究 —— 无人机在动态环境中自主避免碰撞的安全感知技术
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
CMU 研究 —— 学习对人形机器人的实时全身遥操作
【原创】浅聊战斗机器狗
USC 四足机器人研究 —— 通过 RL 增强 MPC 学习敏捷运动和敏捷行为
ETHZ 研究 —— 四足机器人深度柔顺运动控制
控制频率对基于深度 RL 的双足机器人运动扭矩控制器的影响
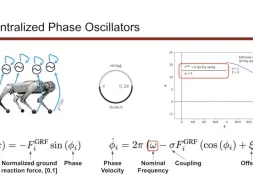
ICRA 2024 - Learning Emergent Gaits with Decentralized Phase Oscillators
苏黎世联邦理工学院 圣诞老人联合 ANYmal 大战实验室恶霸: 在 RSL 进行节日对决!eth 苏黎世联邦理工学院 四足机器人
意大利 IIT 讲座 —— 结合学习和模型预测控制的机器人安全控制
MuJoCo MPC 应用示例:人形机器人跟踪
开源机器人灵巧手(Jetson Nano)教程
AI新作|英伟达:人形机器人!全身控制模式无缝转换
开源 机器人操作数据集 —— DROID: 大规模机器人操作数据集
IEEE 机器人讲座 —— MuJoCo MPC (MJPC)介绍