V
主页
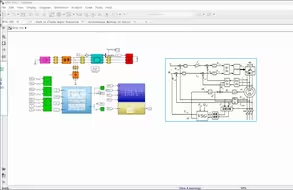
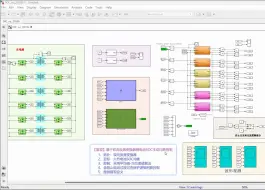
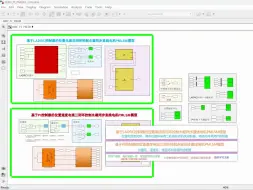
基于LQR控制主动悬架模型2自由度(1/4)
发布人
基于LQR控制主动悬架模型2自由度(1/4) 1、LQR就是依据反馈控制的结构,LQR的目标是通过找到一个状态反馈控制器𝑢=−𝐾𝑥使得代价函数J最小,考虑系统的状态加权(控制效果)和输入加权(输入大小),以状态反馈控制的形式,根据自定权重,求解出最优的反馈系数K。 2、模型对比了主/被动悬架的系统响应结果,如悬架动挠度、簧载质量加速度、俯仰角速度等 3、路面可选择减速带路面、C级路面和扰动(阶跃或脉冲) 4、内容包括算法介绍,建模文档,运行说明和参考文献 另外还有基于LQR控制主动悬架模型7自由度(整车)、基于LQR控制主动悬架模型4自由度(半车)
打开封面
下载高清视频
观看高清视频
视频下载器
PID控制、LQR控制、FLC控制、SMC控制、Backstepping控制、MRAC(模型参考自适应控制)四轴飞行器matlab代码
半主动悬架天棚控制算法原理讲解与仿真
路面不平度时域模型+非线性空气主动悬架
二阶LADRC(带跟踪微分器TD)与PID控制对比模型
【网盘自取】锁相环理论知识分享
半主动悬架PID控制Simulink仿真模型演示
全桥LLC参数计算设计书(Mathcad)(含变压器开关管等器件选型)
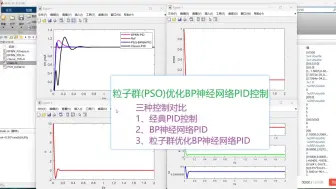
粒子群(PSO)优化BP神经网络PID控制
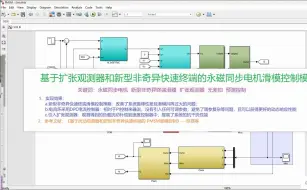
基于扩张观测器和新型非奇异快速终端滑模的永磁同步电机无差拍预测控制模型
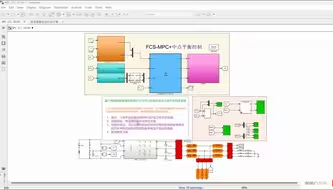
基于有限控制集模型预测(FCS-MPC)相角补偿法三电平并网逆变器
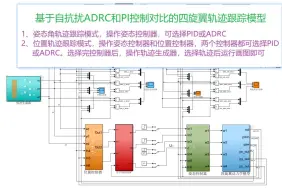
基于自抗扰ADRC和PID控制对比的四旋翼姿态角和位置轨迹跟踪模型
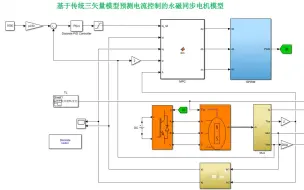
基于传统和改进三矢量模型预测电流控制的永磁同步电机模型
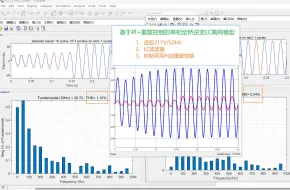
基于PI+重复控制的单相全桥逆变LC离网模型
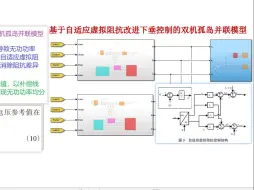
基于自适应虚拟阻抗改进下垂控制的双机孤岛并联模型
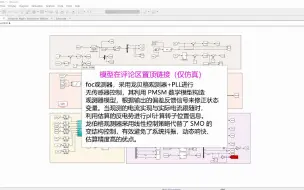
基于matlab建模FOC观测器采用龙贝格观测器+PLL进行无传感器控制(建议二倍速观看)
基于滑膜控制和PI控制的Boost变换器对比仿真
基于转子侧虚拟同步控制VSG的电压型双馈发电机DFIG模型
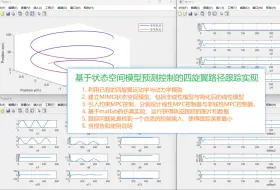
基于状态空间模型预测控制的四旋翼路径跟踪实现
基于VSG控制(虚拟同步发电机控制)的模块化多电平变流器MMC
【一区论文复现】自适应强化学习机械臂控制
二分之一车辆悬架模型
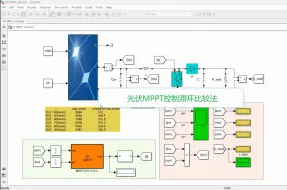
光伏MPPT控制滞环比较法
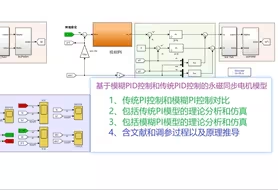
基于模糊PID控制和传统PID控制的永磁同步电机模型
【复现】基于双向反激变换器锂电池SOC主动均衡控制
关于恒功率负载下的Buck变换器建模与控制 状态反馈控制
【复现】光伏并网逆变器接入弱电网的序阻抗建模扫频法与稳定性分析
基于stm32低压无感BLDC方波控制方案(代码+原理图)
电池均衡储能蓄电池充放电均衡控制SOC均衡下垂控制充放电(三组电池)
基于LADRC控制位置电流双闭环和PI控制三闭环控制永磁同步直线电机PMLSM模型
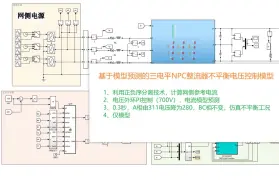
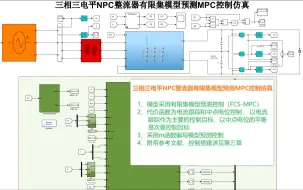
基于模型预测的三电平NPC整流器不平衡电压控制模型
基于反步法or滑膜控制orPID控制的四旋翼无人机轨迹跟踪模型
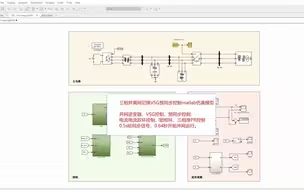
三相并离网快速无缝切换(虚拟同步发电机)VSG预同步控制准PR控制matlab仿真模型
基于双值比较(差值和均值)模糊控制的锂电池组SOC主动均衡
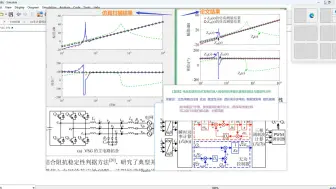
【复现】电压型虚拟同步发电机接入弱电网的序阻抗建模扫频法与稳定性分析
基于 S 函数的 BP 神经网络 PID
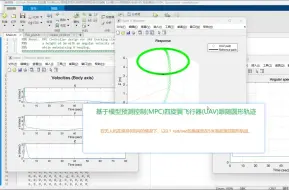
【圆形轨迹】基于模型预测控制(MPC)四旋翼飞行器(UAV)跟随控制
基于单周期控制无桥Boost型PFC
基于双矢量模型预测电流控制的永磁同步电机仿真模型(可选单矢量/双矢量/三矢量)
三电平NPC整流器模型预测控制mpc中点电位平衡仿真
光伏MPPT控制模糊控制算法