V
主页
机器人运动学-空间旋转(轴角,四元数,欧拉角,旋转矩阵)(第一期)
发布人
机器人运动学-空间旋转(轴角,四元数,欧拉角,旋转矩阵)(第一期)
打开封面
下载高清视频
观看高清视频
视频下载器
【深度教学】姿态解算理论及应用(持续更新)
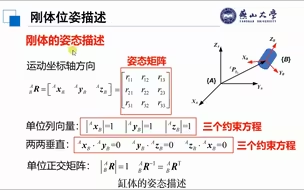
机器人学 | 2.1 机械臂的位姿描述(重点为旋转矩阵)
点云配准教程第二讲:旋转矩阵、旋转向量、欧拉角、四元数
05 姿态解算基础-坐标系 欧拉角 四元数概念
三维旋转动画视频详解,旋转矩阵推导!
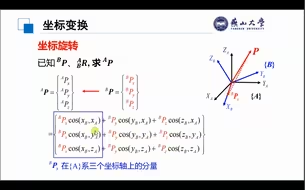
机器人学 l 2.2 坐标变换
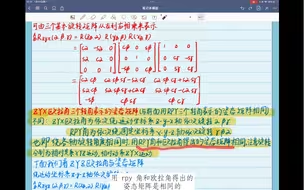
旋转矩阵,欧拉角,四元数转换与推导(一) 任意旋转矩阵推导
06 坐标系,轴心点,万向坐标系,欧拉角旋转,四元数旋转,Gimbal, Euler & Quaternion
机器人学 l 2.5 姿态描述方法:RPY角和欧拉角
《动手学机器人学》(5)(轴角法)或(Rodrigues' rotation formula)或(罗德里格旋转公式)或(一般形式的旋转变换矩阵)详细推导证明啊
【Unity】欧拉角、四元数、矩阵旋转、万向节死锁
【机器人理论最好中文入门课程 没有之一】 机械臂 系统 结构 旋转矩阵 变换矩阵 DH模型 运动学正逆解 轨迹规划 动力学 控制 遥控操作 教程
(7)欧拉角 | 空间位姿表示方法 |《动手学机器人学》
机器人学——李群、李代数快速入门
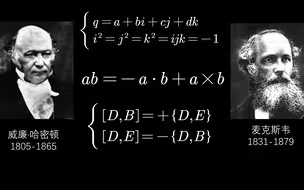
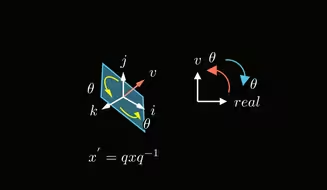
四元数 Quaternion
【较难慎入】证明四元数三维旋转公式
CG07-3D变换和欧拉角/轴角/四元数
四元数与电动力学:标量,矢量,点乘和叉乘的真正来历
四元数和三维旋转
机器人学:建模、控制与视觉——华中科技大学
blender-四元数旋转的原理
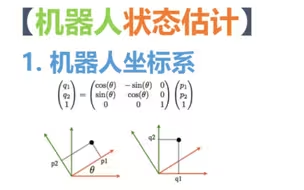
【机器人状态估计】1. 机器人坐标系 变换矩阵 旋转矩阵 世界坐标系 运动坐标系
【机械臂运动学教程】机械臂+旋转矩阵+变换矩阵+DH+逆解+轨迹规划+机器人+教程
无人机DIY入门系列教程:(三)姿态解算上:姿态角、欧拉角与旋转矩阵
四元数姿态解算---四元数与欧拉角
2-2 旋转矩阵
【姿态解算】8:计算欧拉角---用四元数表示刚体姿态
理论力学第七次课03(欧拉角+欧拉运动学方程)
四元数的简单通俗用法(Eigen和python)
机器人学 机器人技术 期末复习(涵盖机器人运动学和机器人动力学部分)
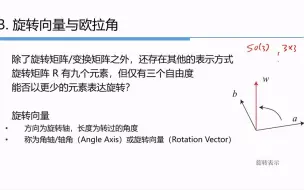
2-3 旋转向量和欧拉角
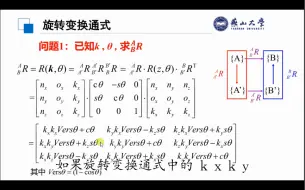
机器人学 l 2.6 旋转变换通式(等效转轴与等效转角)
机器人运动学-空间旋转(轴角,四元数,欧拉角,旋转矩阵)(第二期)
如何旋转一个矢量?从欧拉公式到哈密顿四元数
四元数如何控制物体旋转?
2. 旋转矩阵
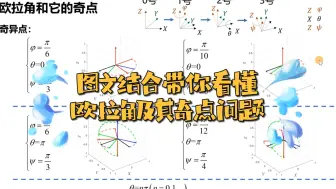
【欧拉角】图文结合带你看懂欧拉角及其奇点问题
反向获取欧拉角EulerZYX
台大机器人学之运动学——林沛群(含课件+书籍)
带你探秘四维的神秘数字——四元数