V
主页
京东 11.11 红包
无人机DIY入门系列教程:(三)姿态解算上:姿态角、欧拉角与旋转矩阵
发布人
姿态解算上集,主要讲解姿态角与欧拉角的关系,以及如何通过加速度计和旋转矩阵直接计算姿态(横滚角与俯仰角)
打开封面
下载高清视频
观看高清视频
视频下载器
【无人机教程】从零开始学习无人机原理及组装
DIY初级作品,四轴飞行器,焊好即飞
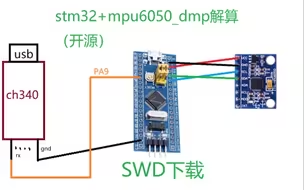
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
机器人运动学-空间旋转(轴角,四元数,欧拉角,旋转矩阵)(第一期)
stm32f103+mpu6050陀螺仪,无人机飞行姿态解算,用匿名上位机显示出来
点云配准教程第二讲:旋转矩阵、旋转向量、欧拉角、四元数
【浙江大学】浙大博导带你从0制作无人机
【深度教学】姿态解算理论及应用(持续更新)
透彻理解旋转矩阵
【欧拉角】图文结合带你看懂欧拉角及其奇点问题
个人DIY数字图传的几种方案介绍
无人机DIY入门系列教程:(一)单片机原理简介
卡尔曼滤波,6轴姿态解算,俯仰角,翻滚角,三连+关注私信发工程
形象理解欧拉角和万向节锁
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
开源,低成本四轴无人机
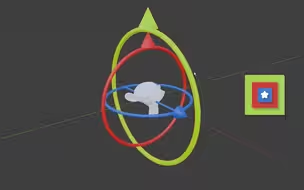
【Unity】欧拉角、四元数、矩阵旋转、万向节死锁
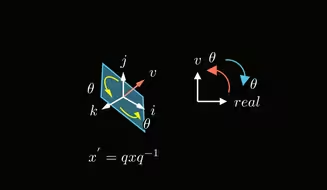
四元数和三维旋转
3.1 坐标系和欧拉角
欧拉角的旋转过程
四元数如何控制物体旋转?
10分钟游戏技巧,了解物体的欧拉角万向锁和四元数旋转
无人机|PID算法详解与实战(上)
卡尔曼滤波 解算六轴数据 教程
“欧拉角旋转”产生“万向锁”的来源,以及如何避免万向锁
【姿态解算】8:计算欧拉角---用四元数表示刚体姿态
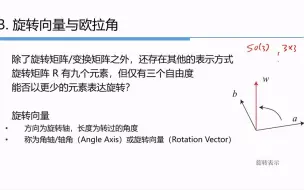
2-3 旋转向量和欧拉角
2-2 旋转矩阵
从零开始DIY无人机第三章:MPU6050姿态解算介绍
B站最快让你了解什么是欧拉角和卡尔丹角的视频!必看!
零基础入门四旋翼建模与控制无人机 | 欧拉角变化率与机体角速度
2.6 固定角和欧拉角
无人机操纵技术合集 - 飞行技巧、姿态认知、注意事项
四轴无人机PID调试
一款欧拉角计算神器
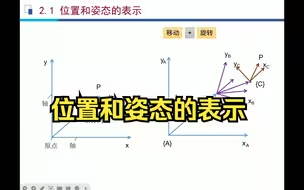
2-1位置和姿态的表示
ELRS3.1新功能——10Khz PWM介绍 | 集成有刷电调的ELRS接收机
[实验部分] 6.8 姿态控制PID调参实验
初步认识欧拉角【旋转矩阵的引入】
无人机入门基本操作:起飞、移动、镜头俯仰、曝光锁定、自动返航与降落,以及起飞前的注意事项